.jpg)
基于智能视觉与欠驱动技术的小型自动化胡萝卜收获机设计与优化研究

吴东霖 罗鑫昊 陈兴男 蒙希闻 夏运权 张雪丽
西昌学院 四川省西昌市 615000
0. 引言
随着生活水平提高,人们对胡萝卜等健康食品的需求增长。中国作为世界最大的胡萝卜生产国其中 2023 年种植面积 1200 万亩,产量超2800 万吨,其收获机械化水平却不足15%。小规模种植区尤其依赖人工收获其中占比超80%,导致效率低、成本高、易错过最佳收获期。虽然大型收获机适用于大规模种植,但对小农户而言成本过高且适应性差。因此,开发适合小规模种植的小型自动化胡萝卜收获机[1],对提升效率、降低成本、推动农业机械化与智能化发展意义重大,市场需求迫切。
图表1中国近几年胡萝卜年产量

1. 国家政策
国家将根茎类收获机械列为重点扶持方向并制定丘陵山区补贴政策《关于加快推进特色作物生产机械化的指导意见》[2]。四川省落实30% 单机补贴 [3],同步推进产学研协同创新与“高质量、高效益、低消耗、低污染”的科技装备发展目标。政策体系为小型自动化胡萝卜收获机研发推广提供强力支撑,契合国家农业现代化战略。
2.1 整体结构与工作原理
小型自动化收获机基于慧鱼模型搭建,采用电磁阀控制筒体传动件实现松土聚拢。集成蜗轮蜗杆、齿轮齿条及链传动系统,具备轻量化与高自动化特性,可精确抓取分离胡萝卜并降低损伤率 [1]。整机由三模块构成:2.1.1 挖掘模块:螺旋铲设计减阻提效;2.1.2 筛分模块:振动筛与风力系统协同分土,筛孔尺寸及振动频率可调;2.1.3 收集模块:传送带与收集筐完成自动打包。2.2 智能视觉- 欠驱动协同自适应系统
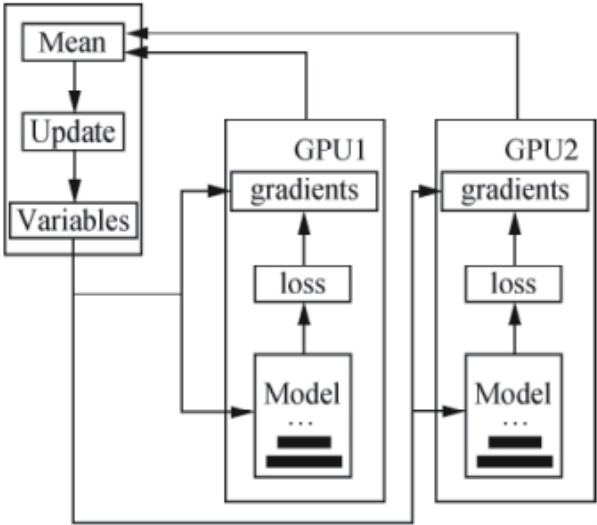
该系统创新性融合计算机视觉与 Capsule Networks[4] 识别算法,结合欠驱动机械设计与智能控制技术,实现复杂地形下的高效精准收获。视觉识别系统基于卷积神经网络(CNN)构建,其计算模型如图 1 所示。系统在双 GPU 上训练近 80,000 张机具图像,单张图片识别效率达 0.1 秒。通过动态路由协议,Capsule Networks 精准捕捉胡萝卜空间层次特征,识别精度达 98.7%,显著优于传统 CNN 的 92.3%。训练集与验证集识别率均超98%(样本无重叠),表明其对环境变化、光照干扰及小区域遮挡具备良好鲁棒性与泛化能力。该系统可准确识别田间胡萝卜的生长状态、大小与位置,为精准收获提供可靠数据支撑。
图 1GPU 计算模型
机械设计采用基于李群理论的欠驱动夹爪,单电机调控夹取力(0.5-3N 可调),适配 20-50mm 胡萝卜,实现结构简化与无损夹取。集成六轴IMU 实时检测地形倾角,智能分配扭矩保障≤25°坡度作业稳定。系统通过传感器信号自适应调节刀片状态、挖掘深度及筛选速度。该设计显著提升收获效率与质量,降低损伤率,为丘陵机械化提供创新方案。
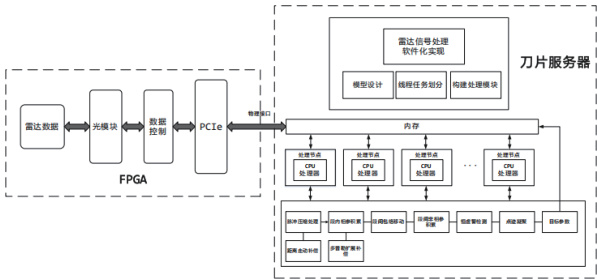
刀片反馈调节系统是本胡萝卜收获机设计的关键创新点,其整体架构如图 2 所示。系统工作流程如下:接收机采集的雷达数据,经滤波与 ADC 模数转换后生成雷达回波数字信号。该信号通过光纤接口传输至 FPGA 板卡,经 FIFO 时钟域转换、数据流整合及 DDR 存储器的乒乓处理,最终由 PCIe 接口传输至刀片服务器内存。驱动层解析数据后,交由后端信号处理线程处理。软件层面,通过设计处理模型与划分线程任务(如数据采集线程、数据处理线程),实现各算法模块化构建与接口互联,并将处理结果写入文件[5]。
图2整体框架
系统通过实时比对预设参数与实际作业状态,高效采集数据并传输至控制中心处理。基于实时反馈,系统精细调控刀片,维持其最佳工作状态。结合胡萝卜生长特性与土壤状况,系统自动优化切削角度与力度,显著提升收获完好度并降低遗漏率 [6]。系统集成自诊断模块实时监控刀片状态,自动调整参数保障运行稳定。基于Hall Sensor 与PID 控制器构建闭环控制系统,每秒采集20 组参数(含刀片转速/土壤阻力/ 振动频率)支撑动态调控。应用模糊逻辑算法智能响应硬土条件:调节切割角度(±10°)、提升频率(最高25Hz)。具备载荷超限自动回缩及报警的机械保护功能。田间试验表明漏收率由8.2% 降至1.5%,验证了收获质量提升效果。
2.4 导入传送装置
导入传送装置的核心功能是将胡萝卜从土壤中拔出并输送至分离装置。其工作流程为:首先,梯形聚拢结构(前宽后窄)将分散的胡萝卜缨子聚集并汇成直线。为避免损伤根部并减少茎部残留 [7],关于缨子最低端距根部最高裸露地面0\~27 mm 的研究,本装置将聚拢结构离地间隙设定为30 mm(可调)。随后,收获机前进,胡萝卜经导入装置进入传送区。
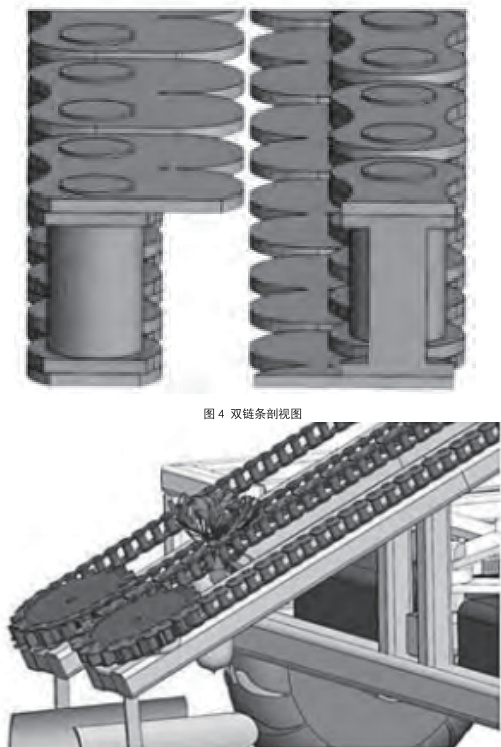
传送装置由间距可调的异形链条(图 3)、传送轴及齿轮组成。异形链条通过增大接触面积提供夹持力(胡萝卜拉断力:110\~308N),链条间距调控可优化摩擦力。胡萝卜在摩擦力作用下沿链条运动,垂直分力克服重力与土壤阻力实现缓拔输送。双链条形成 Z 型卡扣结构(图4-5),有效防止茎叶脱落。装置整体倾斜设计,在疏松土壤装置的辅助下,显著降低了根茎断裂和遗留率 [8]。
图3异形链条传送装置

图5胡萝卜夹持示意图
3. 小型自动化胡萝卜收获机的应用优势
3.1 降低生产成本
小型自动化胡萝卜收获机制作成本相较于传统胡萝卜收获机大幅降低,同时能适应多种复杂环境,自动化程度高,大幅减少人工干预,显著降低了劳动力成本,提高了农业生产的经济效益。以四川某胡萝卜种植户为例,使用该收获机后,每亩胡萝卜的收获成本从原来的800 元降低至300 元,成本降低了62.5%。同时,该收获机的维护成本也相对较低,其关键部件如刀片、筛分系统等均采用了高强度耐磨材料,使用寿命长,更换频率低,进一步降低了使用过程中的成本支出。
3.2 减轻劳动强度与环保优势
自动化作业减轻了农民劳动强度,提高了生产舒适度,而且小型自动化胡萝卜收割机与传统的收获方式相比,在收获过程中产生的废弃物少,对环境影响小,符合发展绿色农业的要求。在作业过程中,收割机通过高效筛分清洁系统,有效地分离土壤和杂质,减少了土壤浪费和对环境的污染,同时其低噪音设计和节能动力系统,为农民提供了更加舒适、环保的作业环境,同时也降低了能源消耗,减少了噪音污染。
伴随农业机械化水平提升与胡萝卜种植规模扩大,小型自动化收获机市场需求显著增长。其技术发展聚焦智能化与高效化:通过物联网技术实现远程监控与智能调度;优化机械结构以增强稳定性、耐用性及维护经济性;改进切割筛分技术提升收获质量与效率。该设备可显著提效降本,随着技术创新与市场拓展,将在农业现代化进程中发挥关键作用。
参考文献:
[1] 邵雨琦 , 邵丽颖 , 魏尚轩 . 小型智能胡萝卜收割机设计 [J]. 机械工程与自动化 ,2025,54(01):122-124.
[2] 农业农村部. 关于加快推进特色作物生产机械化的指导意见(农发〔2023〕12 号)[Z]. 2023
[3] 四川省财政厅. 四川省农业机械购置补贴实施规范(2023 年修订)[Z]. 成都: 四川省人民政府, 2024
[4] 雷雪梅 , 张光强 , 姚旗 , 刘伟渭 , 邱帅 . 基于卷积神经网络的农机图像自动识别研究 [J]. 中国农机化学报 ,2022,43(05):140-147.
[5] 李会涛. 基于刀片服务器的高速机动目标检测实现[D]. 西安电子科技大学,2022.
[6] 金鑫 , 杜新武 , 王世光 , 姬江涛 , 董祥 , 王东洋 . 胡萝卜收获机根茎分离装置设计与试验 [J]. 农业机械学报 ,2016,47(03):82-89.
[7] 李晶 , 张罡肇 , 胡凯 , 王小勇 , 安晶 . 胡萝卜收获机的结构设计 [J]. 农业装备与车辆工程 ,2024,62(03):6-8+17.
[8] 刘志波 , 王家胜 , 戴秋香 , 等 . 基于挖拔收获的胡萝卜几何参数及力学特性试验研究 [J]. 农机化研究 , 2021,43(09):176-179,185.
基金项目:四川省2025 年校级大学生课外科研项目立项项目《川胡智收》(2025KW015)
一作:吴东霖,男,汉族,籍贯四川攀枝花 生于:2006-1-10本科在读,研究方向:机械与电子工程专业。二作:陈兴男,男,籍贯四川成都,生于:2006-05-16本科在读
三作:罗鑫昊,男,籍贯四川自贡,生于:2006-3-01本科在读
四作:蒙希闻,男,籍贯四川达州,生于2004-11-19本科在读
五作:夏运权,男,籍贯四川内江,本科在读
六作:张雪丽,女,籍贯湖南泸溪,本科在读
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)