.jpg)
基于STM32 单片机的自动盖章机的设计与实践

李欣 吴相清 王卫超 罗卫东
天津职业技术师范大学 天津市 300222
一、引言
在现代办公中,盖章的效率和准确性直接影响文件处理速度。传统人工盖章耗时且易出错,而现有自动化设备往往体积庞大、操作复杂。为此,本研究设计了一款基于 STM32 单片机的轻量自动化盖章机,利用其高性能处理能力,结合精密机械结构和智能控制算法,实现快速、精准的盖章操作。该设备结构紧凑、操作简便,可显著提升盖章效率,同时降低人工干预,适用于现代高效办公场景,兼具实用性和经济性。
二、自动盖章机的设计思路
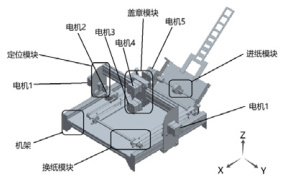
该自动盖章机主要由机架、换纸模块、进纸模块、定位模块和盖章模块五部分组成。
X 方向移动采用同步带实现同步传动,如图 1 所示。电机 1 的输出轴采用同步带与 X 向滑轮连接,X 向滑轮与 X 向滑轨连接,X 向滑轮在电机1 的作用下使其在X 向导轨上移动。
Y 方向移动采用同步带实现同步传动,如图 3 所示。电机 3 的输出轴采用同步带与 Y 向滑轮连接,Y 向滑轮与 Y 向滑轨连接,Y 向滑轮在电机3 的作用下使其在Y 向导轨上移动。
Z 方向移动采用同步带与夹持支撑板传动,电机 4 的输出轴采用同步带与夹持支撑板连接,电机4 的作用下使其在Z 方向上移动。
进纸模块采用电机 5 带动分页轴转动,分页轴带动分页轮转动,进而实现自动进纸的功能。
换纸模块采用电机 2 带动同步带轮转动,同步带轮带动同步带,同步带带动分页轴转动,分页轴带动分页轮和转动,进而实现自动换纸的功能。
该设备主要通过集成机械结构设计、控制系统设计、传感器应用以及电机控制等技术实现盖章过程的自动化控制。利用 STM32 单片机强大的处理能力和丰富的外设接口开发一个稳定可靠的控制系统。该系统将负责接收用户指令,精确控制盖章头的运动轨迹和力度,以实现高质量的盖章效果。同时,控制系统还将集成传感器数据采集与处理功能,实时监测设备状态并提供必要的反馈信息。同时,通过设计一种紧凑、轻量的机械结构确保自动化盖章机的便携性和易用性。通过优化关键部件如盖章头、印章夹持器以及纸张定位装置的设计,实现在保证结构强度的同时,最大限度地减轻设备重量。
三、自动盖章机的设计实施方案
(一)硬件选型与电路设计
硬件选型与电路设计是设备研发过程中的重要环节。本设备精心选择了合适的 STM32 单片机型号,这款单片机不仅具有强大的处理能力和丰富的外设接口,还能满足设备在功耗、成本等方面的严苛要求。在电路原理图的设计上充分考虑控制系统的功能要求、电路的稳定性和可扩展性等因素。通过反复推敲和仿真测试,成功设计出了一套既符合实际需求又具备高度可靠性的电路方案。这套方案不仅实现了对盖章机各执行部件的精确控制,还为后续的功能拓展留下了充足的空间。此外,在机械结构设计方案上注重机械结构的合理性和稳定性,力求在保证功能实现的前提下,最大限度地降低设备的重量和体积。通过不断的优化和调整,最终成功打造出了一款既轻便又实用的自动化盖章机机械结构。
(二)控制系统设计
控制系统作为自动化盖章机的“大脑”,其设计的优劣直接关系到设备的整体性能和用户体验。通过深入剖析用户需求,明确了控制系统需要实现的核心功能,如精确定位、快速响应、安全可靠等。在控制算法设计环节,充分考虑了 STM32 单片机的性能特点和自动化盖章机的实际需求。位置控制算法和速度控制算法是两大核心,直接关系到盖章的准确性和效率。软件程序的编写是控制系统设计的关键环节。在编程过程中,严格遵循了模块化设计的原则,将不同功能划分为独立的模块,这大大提高了代码的可读性和可维护性。
(三)机械结构设计
1. 换纸模块
在换纸流程中,纸张经由进纸模块顺利进入装置。随后,在主动轮与从动轮的协同驱动下,纸张被精准地输送至预设的指定位置。待纸张完成书写任务后,主动轮和从动轮再次启动,持续带动纸张向前行进,直至纸张完全脱离底座区域。这一退纸机制设计巧妙,操作便捷,有效节省了人力与时间成本,著提升了整体工作效率。
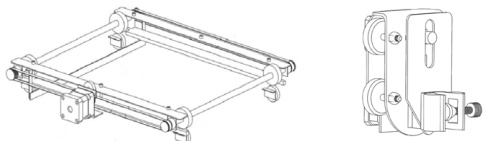
2. 盖章模块
电机 4 与夹持支撑板保持固定连接状态,其输出端与摆动杆中部实现稳固连接。摆动杆两端各装有一根弹簧,其中一根弹簧的另一端连接至移动板,另一根弹簧的另一端则固定在夹持支撑板上。印章夹固定安装在移动板远离夹持支撑板的一侧,用于夹持固定印章。电机4 通过导线与控制面板相连,接受控制指令。当电机 4 进行正反向转动时,会带动摆动杆两端摆动,通过弹簧的弹性作用使移动板产生上下移动,进而带动印章夹调整印章高度,以实现精确盖章操作。
机械结构设计是本项目研发的关键环节,它直接关系到自动化盖章机的性能和使用效果。盖章头是盖章机的核心部件,直接影响到盖章的质量和效率,采用了高精度的制造工艺,确保盖章头的精确度和耐用性。同时,考虑到轻量化的需求,选用了轻质材料,并进行了结构优化,以减少不必要的重量。传动机构负责将电机的动力传递给盖章头,实现盖章动作。为了确保传动的平稳性和准确性,采用了高精度的同步带和带轮,并进行了精确的装配和调整。此外还对传动机构进行了润滑和散热设计,以提高其使用寿命和稳定性。在支撑结构的设计上,注重结构的稳定性和抗震性能。通过合理的布局和选材,确保支撑结构能够承受盖章过程中的各种力和震动,从而保证盖章的准确性和稳定。
(四)自动盖章机实物调试
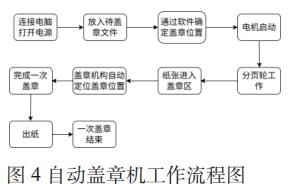
首先,需预先设定好纸张上所需的盖章位置。随后,将纸张平稳放置在进纸板处,并启动设备。此时,在电机 5 的驱动下,分页轮开始转动,进而带动纸张进入换纸机构。在纸张进入过程中,电机4 同步运作,驱动拨片将浮动支撑板向上抬起,为纸张的顺利进入提供空间。纸张在分页轮与主动轮的共同作用下持续移动,直至抵达底座顶部。待纸张准确到达预设位置后,设备自动停止纸张的移动操作。纸张就位后,电机1 和电机3 开始工作,分别驱动X 向运动机构和Y 向运动机构,以精确调整盖章模块的位置。位置调整完毕后,设备即执行盖章操作。盖章操作完成之后,电机 2 随即启动,驱动退纸模块执行退纸动作。在退纸模块的作用下,纸张被带动并逐渐离开底座,直至纸张完全脱离底座区域。
随后重复以上操作。以实现批量自动盖章。

四、结语
本设备以 STM32 单片机为核心,充分利用其强大的处理能力和丰富的外设接口,通过精细的编程实现对盖章过程的全面自动化控制。同时在机械结构设计方面创新性地引入了轻量化设计理念,通过巧妙的结构布局和优化设计,不仅提升了设备的便携性和实用性,更为办公自动化设备的设计带来了新的思路和实践。
参考文献
[1] 朱向庆 . 基于 STM32 单片机的通信技术实验系统设计Experimental Technology & Management[J].2019,10.
[2] 郝张振 . 基于 STM32 单片机的转速扭矩显示传输系统的设计[J]. 电子设计工程 ,2017.
[3] 彭刚 . 基于 STM32 单片机的 AGV 控制系统设计 [J]. 伺服控制 ,2013,10-15.
[4] 张建中 . 基于 STM32 单片机的智能消防机器人的设计与应用[J]. 电子技术应用 ,2017.
[5] 周紫薇 . 基于 STM32 单片机的蓝牙听诊系统设计 [J]. 医疗卫生装备 ,2024,1.
[6] 马骏. 基于STM32 单片机的数据采集与控制电路设计分析[J].造纸装备及材料,2024.
2024 年大学生创新创业训练项目(202410066021)
作者简介:李欣(1989-),男,河南滑县人,助理研究员,主要研究方向:高等教育工程管理;
吴相清(2002-),男,江西奉新人,2023 级本科生。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)