.jpg)
基于 A* 算法的无人机仿地航线规划方法研究

田金霖
核工业航测遥感中心 河北省石家庄市 050002
关键字: A⋆ 算法 无人机 仿地飞行 航线规划
0 引言
A* 算法由早期搜索算法的基础上逐步改进而来,1968 年,PeterHart 等在论文中正式提出 A* 算法 [1]。该算法结合了 Dijkstra 的最优性保证和最佳优先搜索的高效性,通过引入启发式函数来平衡路径搜索的准确性和速度。
针对传统 ∇A* 算法搜索节点过多搜索时间较长的不足,国内外学者进行不同的研究对其进行改进。穆中林等通过引入 Cheap 表优化Open 表维护机制及基于形态学骨架化的搜索空间压缩策略,解决了传统算法在大规模地图中搜索耗时过长的问题,显著提升实时性并确保规划航路的可行性与可操作性 [2]。
1 仿地测线规划方法
1.1 算法
A* 算法借助代价函数来对搜索空间中航迹节点的优先级进行衡量,通过迭代的方式,有效地查找到从起点到终点的最优路径。
其代价函数由两部分构成,具体定义如下:
f(n)=g(n)+h(n)
式中, f(n) 为综合代价函数,表示由起点 S 出发经过当前节点 n到达终点 T 的总预计代价, g(n) 为起点 S 到当前节点 N 的路径代价,h(n) 为启发函数,估计从当前节点 Πn 至终点 T 的代价。
1.2 网格化计算空间
计算前首先对二维计算空间 Ω 进行网格化处理,设点 (x,y) 为某一点坐标, σX 为当前点距起始点的距离,y 为当前点的海拔高度,结合起点和终点的位置信息、地形海拔以及任务要求的离地飞行高度,可以确定计算空间的大小。设 Xmax 为 Ω 对应飞行距离的最大值,以Ymax 为 Ω 对应海拔高度的最大值,综上 Ω 的范围可以表示为集合
 。以矩形网格作为基本单元,通过计算从当前网格到目标节点路径的最小累积代价值来确定每个网格的最佳代价值,逐步完成对整个计算空间的构建。将地形网格化后的节点进行标记,无人机可到达区域标记为 0,代表航迹可以向此处延伸,危险区域、地形区域标记为非 0,代表航迹不可向此处延伸,节点扩展时自动省略不可到达的区域。
。以矩形网格作为基本单元,通过计算从当前网格到目标节点路径的最小累积代价值来确定每个网格的最佳代价值,逐步完成对整个计算空间的构建。将地形网格化后的节点进行标记,无人机可到达区域标记为 0,代表航迹可以向此处延伸,危险区域、地形区域标记为非 0,代表航迹不可向此处延伸,节点扩展时自动省略不可到达的区域。
1.3 代价函数
(1)任务航高约束:任务航高是无人机飞行的核心参数,需在航线规划中严格遵循预设高度以确保数据精度。加强此约束,可使航线尽可能贴近设计航高,可有效提升数据分辨率与信噪比。
(2)垂直机动次数:指在无人机飞行过程中垂向姿态发生的变化,如爬升、下降等。频繁的垂直机动会导致传感器姿态不稳定,增加数据噪声,降低测量精度。对此进行约束能够优化航点个数,使飞行过程更加平稳。
引入任务高度约束和垂直机动次数约束的代价函数形式如式(2)所示:

式中, H(i) 为第个节点离地高度与该点任务高度的差值, H(i) 越小,表示无人机越接近任务高度; M(i) 为第 i-1 个节点到第 i 个节点的垂直机动代价, M(i) 越小,表示规划路径中的垂直机动次数越少; Di(n)
为由当前节点 Πn 至起点 S 的规划路径长度代价,若 Di(n) 越小,则表示无人机飞行航迹越短。
启发函数 D2(n) 用当前节点 Πn 至终点 T 的曼哈顿距离来表示。设当前节点 Πn 的坐标为 (xn,yn) ,终点的坐标为 (xT,yT) ,则两点的曼哈顿距离可以表示为
D2(n)=|xn-xT|+|yn-yT|
1.4 算法流程
算法主要流程为初始化计算空间,输入起点、终点信息,读入约束信息,从起点开始,不断拓展节点并计算出相应的航迹代价函数f(n) ,不断迭代筛选出最优节点,最终回溯并完成航线规划。
2 模拟实验
编程实现上述算法,以某山区地形剖面数据为例,剖面长度 3.8km ,剖面最低点海拔 917.4m ,剖面最高点海拔 1279.2m ,高差 361.8m 。参数设置如下:垂直速度 2m/s ,最大水平速度 15m/s ,最大爬升 / 下降角 7.5∘ ~90∘ 。首先讨论不同参数权重取值的航线结果,如下图 4所示。
图4 不同参数取值规划结果
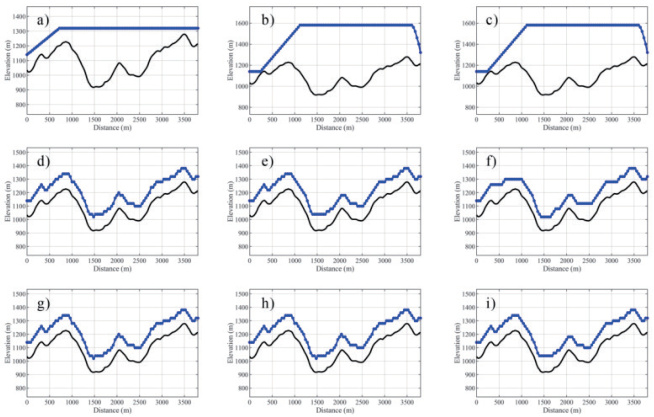
图中,黑色曲线为地形剖面,蓝色曲线为算法规划航线。图中,从上至下为任务高度权重分别取 0、0.5、1,从左至右垂直机动约束权重分别取 0、0.4、0.8。对比图 a)、d)、g) 能够看出,随着任务高度约束的不断增加,航线结果更加贴近地形。对比图 d)、e)、f),随着垂直机动约束的不断增加,航线依然有较好起伏趋势,并且航点个数更少,航线更加平直,无人机的纵向姿态变化次数更少。
3 结论
本文在综合分析复杂地形条件下无人机仿地航线规划问题的基础上提出了一种新的算法,通过编程实现了无人机仿地航线规划,试验结果表明算法结果在满足任务要求的同时,保证了复杂地形条件下设备的飞行安全,具有一定的实际应用意义。
参考文献
[1] Peter H, Nils N, Bertram R. A Formal Basis for the Heuristic Determination of Minimum Cost Paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2):100-107.
[2] 穆中林 , 鲁艺 , 任波 , 等 . 基于改进 A⋆ 算法的无人机航路规划方法研究 [J]. 弹箭与制导学报 , 2007, (01):297-300.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)