.jpg)
杆塔作业工器具快速固定装置的多自由度机械锁定机构设计

杨景天
贵州电网有限责任公司凯里剑河供电局 贵州剑河 556400
1 引言
杆塔作业作为一种特殊的高空作业形式,广泛应用于电力、通信等行业。随着技术的不断进步,杆塔作业的设备和作业流程也逐渐演变。在实际作业中,工作人员常常需要在杆塔的不同高度进行各类操作,包括设备安装、维护和检修等。这些作业不仅对工作人员的技能提出了高要求,同时也对安全性和效率提出了更严格的挑战。
目前,杆塔作业仍然面临诸多问题。首先,作业环境复杂,气候变化、风速、温度等因素都可能对作业安全产生直接影响。例如,强风天气可能导致作业人员在杆塔上失去平衡,增加事故发生的风险。此外,作业人员在高空操作时,常常需要频繁更换工器具,导致作业效率降低。传统的工器具固定方式往往无法满足快速更换的需求,造成作业过程中的不便。其次,现有的工器具固定装置多为单一自由度设计,难以适应杆塔作业中工器具多样化的需求。这种局限性不仅影响了作业效率,也增加了工器具掉落的风险,从而对作业人员的安全构成威胁。在一些极端情况下,工器具的脱落可能导致设备损坏或人身伤害,带来严重的经济损失和安全隐患。
图1 作业人员登塔作业

在杆塔作业中,工器具的快速固定与释放显得尤为重要。针对这一需求,设计一种能够实现多自由度的机械锁定机构显得尤为必要。通过改进工器具的固定方式,可以显著提高作业的安全性和效率。
2 多自由度机械锁定机构设计原理
2.1 机械锁定的基本概念
机械锁定的基本概念涉及如何通过机械结构实现对工器具的固定与稳定。在杆塔作业中,工器具的安全性和可靠性直接影响到作业效率和人员安全,因此设计一种高效的机械锁定机构显得尤为重要。
机械锁定通常依赖于物理结构的相互作用,通过力的传递和约束实现对工器具的位置固定。锁定机构一般包括锁定元件、触发机构和承载结构三部分 [1]。锁定元件如插销、销钉、夹具等,在实施锁定时能够有效抵抗外部力的作用,保持工器具的稳定。触发机构通过手动或自动的方式操作锁定元件,从而实现快速锁定和释放。承载结构则提供支持,确保锁定效果的可靠性。
在实际应用中,工器具固定装置的设计需要考虑多个因素。例如,载荷能力、适应性、操作便捷性及耐用性等。以电力杆塔作业为例,作业人员常常需要使用不同的电动工具和手动工具,固定装置必须能够快速调节,以适应不同工具的形状和重量。同时,材料的选择也至关重要,需确保在恶劣天气条件下仍能保持其固定效果。
2.2 多自由度的设计思路
多自由度的设计思路主要围绕实现杆塔作业工器具固定装置的高效、灵活和安全进行展开 [2]。在设计过程中,首先考虑到工器具在不同作业环境下的多样性与复杂性,必须确保固定装置能够适应多种工器具的需求。例如,在高空作业时,工器具的重量、形状及其与杆塔的连接方式都存在差异,设计必须具备一定的通用性。
通过引入多自由度的机械锁定机制,设计能够实现对工器具各个方向的稳定固定。这种设计思路不仅可以解决传统固定装置存在的单一方向锁定问题,还能有效应对作业过程中的振动和冲击。例如,设计一款结合了球铰链和滑轨的锁定机构,能够在三个维度上自由调节工器具的角度与位置,从而确保在各种倾斜状态下仍能保持工器具的安全 [3]。
多自由度的设计思路不仅提升了杆塔作业工器具固定装置的功能性,还为未来的智能化应用奠定了基础。通过不断优化设计,满足更高的安全标准与操作效率,能够在实践中得到广泛应用,推动杆塔作业的现代化发展。
2.3 机械臂设计
本文采用的技术方案是:包括第一转臂和第二转臂,所述第一转臂的一端部与所述第二转臂的一端部转动地连接,所述第一转臂远离所述第二转臂的一端设置有第一球形座,所述第一球形座内万向转动地设置有第一球关节,所述第二转臂远离所述第一转臂的一端设置有第二球形座,所述第二球形座内万向转动地设置有第二球关节,所述第一转臂上设置有能够沿所述第一转臂延伸方向滑动的第一滑块,所述第一滑块一端抵在所述第一球形座上、另一端设置有第一连接部,所述第一转臂上还设置有第一换向轴,所述第一换向轴位于所述第一连接部与所述第一球形座之间,所述第二转臂上设置有能够沿所述第二转臂延伸方向滑动的第二滑块,所述第二滑块一端抵在所述第二球形座上、另一端设置有第二连接部,所述第二转臂上还设置有第二换向轴,所述第二换向轴位于所述第二连接部与所述第二球形座之间,所述第一转臂或第二转臂转动地设置有缠绕轴,所述多自由度自锁机械臂还包括绷紧绳,所述绷紧绳的中部缠绕在所述缠绕轴上,所述绷紧绳的一端绕经所述第一换向轴后连接在所述第一连接部上,另一端绕经所述第二换向轴后连接在所述第二连接部上,所述多自由度自锁机械臂还包括用于驱动所述缠绕轴转动的驱动装置。
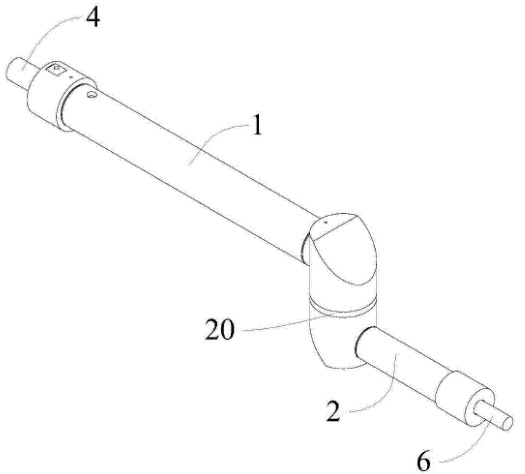
图2 多自由度自锁机械臂
1、第一转臂;2、第二转臂;4、第一球关节;6、第二球关节;20、增磨片
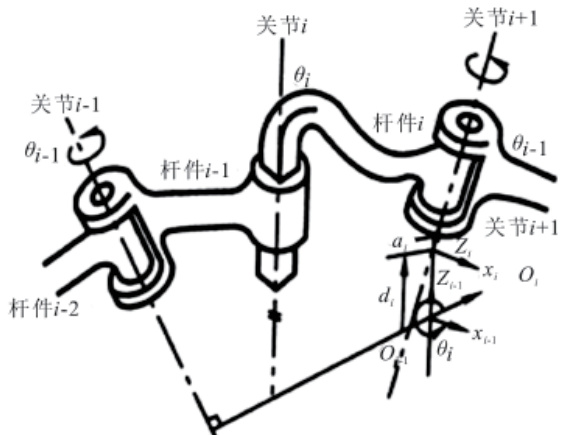
建立机械臂模型需要用到 4 个参数,即连杆长度 u、连杆扭角 a、两连杆距离 d、两连杆夹角 B。连杆长度指连杆上两个关节轴线的最小距离 ; 连杆扭角指两关节轴线的夹角 ; 两连杆距离指关节轴上两个法线的距离;两连杆夹角指关节轴上两个法线的夹角。连杆四参数示意图如图3 所示。
图3 连杆四参数结构示意图
3 应用效益分析
该项目研发成功后不仅用于国网、南网电力行业,在所有杆塔上工作时都可以使用。应用前景可观,推广层级(省公司)。
社会效益:给杆塔作业人员提供临时工器具固定,防止工器具高空坠落,对杆塔下面人员造成伤害该项目研制可以减少现场作业人员的违章行为。
经济效益:减少工器具等物品高空坠落风险,降低杆下人员被物品伤害的风险,提高杆塔上工作人员工作效率,减少违章发生。
结语
在实际应用中,多自由度机械锁定机构能够根据不同的作业需求灵活调整锁定方式,提升了适应性。例如,在高空作业中,工器具的稳定性至关重要,该机构能够快速锁定并保持稳定,有效减少了工人操作时的安全隐患。通过精确的机械结构设计,锁定机构不仅能够实现快速固定,同时也便于工人进行拆卸,节省了作业时间。综合来看,多自由度机械锁定机构的设计不仅提升了杆塔作业的安全性与效率,也为相关领域的技术发展提供了新的思路和方向。随着技术的不断进步和应用范围的扩大,未来有望在更多复杂作业环境中发挥重要作用。
参考文献
[1] 刘送永 , 徐海乔 , 张德义 , 等 . 多自由度自动喷浆机械臂运动分析及路径优化 [J]. 煤炭学报 , 2020, 46(S02):1079-1088.
[2]白昊天,李萍.多自由度书写机械臂控制系统设计[J].绿色科技,2019(2):3.DOI:CNKI:SUN:LVKJ.0.2019-02-062.
[3] 梁辉 , 张广兴 , 王术徽 , 等 . 九自由度上肢康复机构及其运动学分析研究 [J]. 机械制造与自动化 , 2020(006):049.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)