.jpg)
驾驶辅助智能系统的多模态光电感应车灯动态调光算法研究

张誉麟 杨鹏 王肖肖 孙胜坤 左铭涛 苏子强
天津职业技术师范大学 300350
关键词:光电传感器技术;STM32 嵌入式;夜间车灯调节;STM32 和 Photoelectric Sensor 模块对光信号强度的检
一、引言
1. 研究背景和意义
随着我国社会经济的快速发展,机动车持有量持续攀升,自驾出行已成为广大人民群众首选的交通方式。在城市化进程相对滞后的县域地区,入夜后道路照明设施不足的问题尤为突出,加上部分驾驶员未能规范使用近光灯,致使相向而行的车辆在夜间频繁产生眩光干扰,由此引发的交通安全隐患和道路矛盾纠纷,已然成为亟待引起重视的社会问题。因此,我们基于 STM32 和 Photoelectric Sensor,设计了可自动调节车灯的小车,能大幅度降低夜间因灯光产生的交通事故。
2. 国内外研究现状分析
在光感探测技术方面,我国已建立起完善的技术体系,具有高精度的环境光照监测以及生物体运动的识别能力,为照明系统的智能化管理奠定了技术基础。但是,当前光敏探测装置仍存在明显缺陷:灯光环境复杂,容易导致信号失真,在复杂情况下会出现测量偏差,会影响系统的综合质量。
车灯的智能化目前是国外汽车灯具的一个主要发展方向 , 为了改善夜间滥用灯光造成的视线不良问题 , 提出了一种新的智能照明系统 , 即 AFC 系统。
二、相关技术综述
1.Photoelectric Sensor 模块概述
光电探测装置是基于光电转换原理设计的电子器件,通过分析光信号变化实现对目标物存在状态、空间位置及表面特征等参数的检测,在工业控制、安防监控和智能终端等领域具有重要应用价值。
2. 激光测距技术的原理
激光测距技术包含激光脉冲测距、激光相位测距、三角法测距等多种测距方式。激光脉冲测距主要用于长程测距,其测距精度在公里级以上,但精度不高,通常的精度应为米;在中等距离的测量中,激光相位测距是比较理想的,通常在 50 m、150 m、300 m、500 m 的范围内,其准确度通常为毫米;而三角激光测距,精度一般都是在 2 m左右(通常是 2 m),而高精度的测距,一般可以达到微米级,但是距离有限
3. 激光测距技术的特点
激光测距法是一种非接触式的工业检测方法,和常规的接触式测距方法比较有着如下的优势:激光单色性高,方向性强,相干性好,它的光束呈直线状分布、散射小、波速能量集中、传播距离远。激光测距技术应用于车辆碰撞防护中,其工作原理是:先将车辆内装有激光雷达的激光光束照射在前方车辆的反光镜上,再对反射器的光速到达时间进行检测,并通过激光光束的发射和回程的时间差来确定车辆的间距。
三、系统设计与实现
1. 系统总体框架设计
四、系统测试与性能评估
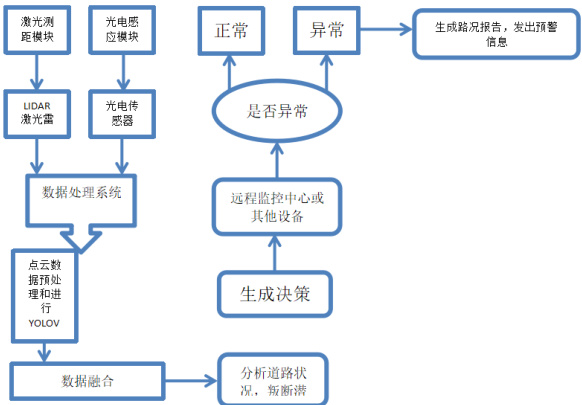
1. 整体工作原理
(1)环境光检测:光敏传感器感应环境光强度。
(2)来车检测:使用激光模块检测前方车辆距离。
(3)距离判断:
安全距离以上:保持远光灯;进入安全距离范围:自动切换为近光灯,且对车进行降速;车辆通过后:恢复远光灯,车速逐渐增加;在会车时:后面车不在危险距离,进行降速,在危险距离,车速不变。
2. 测试方案
1. 功能测试
(1)测试在夜间会车时,能自动开启符合环境的车灯。
(2)测试激光探测或超声波模块的测距精度,确保在安全距离内自动切换近光灯,超出后恢复远光灯。
2. 环境测试
(1)在夜间光照不足的情况下测试系统响应。
(2)模拟在复杂的天气环境下,检测小车的抗干扰能力以及逻辑系统的稳定性。
3. 模拟场景测试
(1)模拟会车场景,使用移动车辆和固定障碍物,检测小车是否能完美的交替近远光灯。
(2)测试在车辆较多时,小车对周围复杂环境的处理能力。
4. 抗干扰能力测试
(1)在光源不稳定或存在障碍物的环境下,对小车能实现灯光的交换以及避障功能行为的检测。
(2)在极端温度下,测试小车电路结构的稳定性。
(3)连续在复杂和极端环境下进行长时间运行,观察是否小车是否出现工作失误现象。
五、夜间模拟测试
(1)环境:选取夜间光线不足的封闭室外道路。
(2)测试内容及步骤:
1. 安全距离外远光灯保持测试:两辆小车相向行驶,未到安全距离,后方车辆处于危险距离外,观察车速是否降低。
2. 安全距离内近光灯切换以及降速测试:两辆小车相向行驶到安全距离,记录近远光灯切换的数据,后方车辆行驶到危险距离内,观察车速是否稳定。
3. 车辆通过后切换到远光灯测试:模拟会车后,车辆完全通过,记录远光灯的恢复时间。
六、结束语
本项目基于 STM32 芯片,结合光电传感器、激光测距和超声波模块,实现了夜间会车时汽车能自动切换近远光灯和对自身车速的智能调节功能,有效提升了夜间行车的安全性。
此项目在提升交通安全方面:1. 减少光灯滥用导致发生眩晕而引起事故的几率和降低夜间会车时发生交通事故的风险。2. 智能调节车速功能,可辅助驾驶员避免追尾而发生交通事故,尤其适用于夜间照明不足的乡间公路。
本系统还可以与汽车其他辅助智能系统结合,实现在车辆及多和夜间照明不足而的情况下自动切换近远光灯和车速的智能调节功能,建设更安全的夜间交通环境。
参考文献:
[1] 曹家乐, 陈嘉强, 郭炳辰, 等. 基于STM32 的智能车多模式交互系统优化 [J]. 山西电子技术 ,2025,(02):65-67+94.
[2] 冉 德 智 , 杨 晓 辉 . 激 光 测 距 在 汽 车 智 能 防 撞 系 统中 的 应 用 [J]. 专 用 汽 车 ,2023,(01):61-63.DOI:10.19999/j.cnki.1004-0226.2023.01.020.
[3] 齐斌, 唐珊珊. 基于恶劣环境下智能化自动控制车灯的研究[J]. 南方农机 ,2019,50(02):190-191.
资助项目:2025 年国家级大学生创新创业训练计划(项目编码:202510066126)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)