.jpg)
智能箱包多传感器融合的防丢失功能研究

陈小芳
深圳瑞纳森箱包有限公司
1、智能箱包防丢失系统组成与功能结构
智能箱包防丢失系统采用模块化分层设计,各层紧密协作实现核心功能。位于底层的传感器层集成 GPS、蓝牙信标、WiFi 嗅探、IMU(含加速度计、陀螺仪)及环境光传感器等,负责全方位采集箱包位置、运动状态、环境光照等原始数据。融合处理层作为系统核心,接收传感器层数据,运行多源信息融合算法,进行数据清洗、关联、状态估计(如精确位置解算、运动模式识别)及丢失风险评估,输出高置信度的箱包状态信息[1]。通信层利用低功耗蓝牙(BLE)、蜂窝物联网(NB-IoT/Cat-M1)或 LoRa等技术,负责将处理后的关键状态数据及报警信息稳定、安全、低功耗地传输至用户终端或云端平台。顶层的终端应用层面向用户,提供实时位置显示、地理围栏设定、多级报警(声光、手机推送、振动)触发、丢失路径回溯及系统设置等交互功能。
图 1 智能箱包防丢失功能示意

2、智能箱包防丢失系统多传感器选择与集成依据
传感器选型与集成的核心在于满足复杂场景下的可靠感知需求并兼顾箱包应用约束。全球定位系统(GPS)提供室外广域绝对位置信息,是追踪基础,但需解决室内/高楼遮挡失效问题。蓝牙(BluetoothLE)信标具备极低功耗与近距离高精度测距能力(通常<100 米),是实现与手机近场分离报警及室内辅助定位的关键。WiFi 嗅探可扫描环境中 AP 信号强度(RSSI),利用指纹数据库或三角定位在 GPS 失效区域(如机场大厅、酒店走廊)提供位置参考。惯性测量单元(IMU)通过加速度计、陀螺仪持续监测箱包运动(静止、行走、搬运、跌落)及航向变化,在信号中断时提供短时航位推算 (DR)[2]∘ 环境光传感器则辅助判断箱包是否处于暴露环境(如被遗留在出租车外)。选型时严格权衡成本、功耗、体积与重量及环境适应性,通过异构传感器优势互补,构建全天候、全场景感知能力。
3、智能箱包防丢失系统数据传输与通信技术方案高效可靠的数据传输是连接感知与应用的桥梁,需依据场景需求选择最优通信方案
表 1 数据传输通信方案选择表
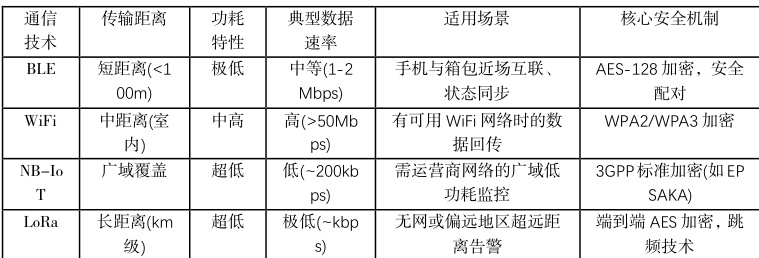
系统采用混合通信策略:常态下依赖超低功耗的 BLE 维持手机与箱包连接;一旦 BLE 断开(超出范围)且触发报警条件,立即激活 NB-IoT/LoRa 模块发送位置和报警信息至用户手机及云端,兼顾了能耗优化(主用 BLE 休眠,广域模块按需激活)。所有传输通道均实施强加密(如 AES-128)与认证机制,保障位置等敏感数据安全[3]。设计心跳包、多链路冗余及自适应重传机制应对信号波动,确保通信稳定性。
4、基于多传感器融合的智能箱包防丢失功能关键技术应用
4.1 多传感器信息融合算法设计
多传感器融合算法是提升防丢失可靠性的核心。针对箱包典型状态(静止、运动、室内、室外),采用层次化融合策略。底层数据级融合处理同构传感器(如 IMU 内部三轴数据)进行姿态解算与运动检测。核心的特征级融合整合 GPS 坐标、WiFi 指纹、蓝牙距离及 IMU 航迹,采用自适应加权融合算法:根据各传感器实时置信度(如 GPS 信号强度、WiFiAP 数量)动态分配权重,在开阔室外 GPS 权重最高,进入室内则自动提升 WiFi/蓝牙权重。对于复杂运动状态变化(如箱包突然被提起移动),结合卡尔曼滤波或粒子滤波融合 IMU 运动数据与间断的位置信息,实现平滑跟踪与短时预测。在信号严重缺失区域(如地下车库),利用模糊逻辑基于历史运动模式和环境信息(如光感判断是否在车内)进行状态推理。该混合架构显著提升了不同场景下位置和状态感知的准确性,有效降低了单一传感器失效导致的误报与漏报。
4.2 位置识别与精度提升机制
解决传统 GPS 定位在复杂环境中的盲区与漂移是关键挑战。本系统深度融合多源定位信息:在开阔室外,GPS 提供基准位置,辅以 IMU 航向数据纠正短暂漂移。进入城市峡谷或高架下,利用 WiFi定位技术(扫描周边 AP 的 MAC 地址与 RSSI,比对云端指纹数据库)提供补充定位,精度可达 5-15米。在室内环境(如机场候机厅、酒店),采用蓝牙信标三角定位或近场感知(与用户手机距离),结合 IMU 航位推算(DR)在无信标区域延续轨迹。特别地,当箱包处于转运状态(如出租车后备箱),系统通过融合短暂捕获的 GPS 点、车辆可能的运动模式(由 IMU 加速度模式推断)及环境光变化(进入/离开隧道),构建更连贯的位置轨迹。这种“GPS+WiFi+蓝牙+IMU”的异构互补机制,显著提升了定位的连续性、精度(尤其在信号遮挡区)及整体鲁棒性。
4.3 关键事件触发机制设计
精准识别潜在丢失事件依赖多维度智能触发逻辑。核心是动态距离阈值监控:基于 BLE 信号强度(RSSI)实时计算箱包与绑定手机的距离,当超过用户预设的安全阈值(如 10 米),且手机持续远离(通过 RSSI 变化率及方向判断),触发初级“分离预警”。若分离持续并伴随异常震动模式(由 IMU 识别,如高频剧烈晃动暗示可能被抢夺拖行),或箱包处于运动状态而手机静止(反之亦然),则升级报警级别。针对遗忘场景,设计滞留超时检测:当箱包在非“安全区域”(如家庭/办公室地理围栏外)长时间(如用户设定 5 分钟)保持静止且远离机主,触发“遗忘报警”。系统持续分析运动方向一致性(箱包移动方向与机主行进方向持续大幅偏离),作为被盗风险的重要指标。该机制综合利用空间距离、运动模式、时间维度及环境信息,显著提高了事件判别的准确性,有效区分正常使用与真实风险。
4.4 报警与回溯机制实现
一旦触发潜在丢失事件,系统立即启动多通道报警:箱包内置蜂鸣器发出高分贝警报声,马达产生强烈振动以震慑非法触碰者并引起周围注意;同时,通过通信层(BLE/NB-IoT 等)向绑定用户的智能手机 APP 发送强提醒推送(含实时位置地图、事件类型)。用户可通过 APP 一键查看箱包最后已知精确位置及运动轨迹。更为关键的是,系统在云端持续记录并加密存储箱包的关键状态快照(包括时间戳、融合后的位置、传感器读数、事件标记),形成完整的时空轨迹日志。当发生丢失,用户可访问云端平台,进行详细的丢失路径回溯,重现箱包在丢失前后的移动路线、停留点和状态变化,为快速寻找或后续处理提供至关重要的线索与证据链。此机制极大增强了事后追溯能力。
5、结论
本文系统性地构建并论证了基于多传感器融合的智能箱包防丢失解决方案。通过设计分层清晰的系统架构,实现了功能模块的高效协同。深入阐述了异构传感器的选型依据与集成策略,重点平衡了成本、功耗、体积及环境适应性需求。创新性地采用 BLE/NB-IoT/LoRa 混合通信方案,有效优化了能耗,并确保了数据传输的安全与稳定。核心技术突破在于:应用自适应加权融合、卡尔曼滤波等算法提升多源数据融合质量;通过 GPS、WiFi、蓝牙与 IMU 的深度互补显著增强复杂环境下的定位精度与鲁棒性;设计基于动态距离、异常运动、滞留超时等多维判据的智能事件触发机制;实现多通道即时报警与基于云端日志的丢失路径回溯功能。该方案显著提升了智能箱包对丢失风险的主动感知、精准判断与快速响应能力,为降低行李丢失率提供了切实有效的技术路径,具有明确的应用价值与行业推广前景。
参考文献
[1]于淼,王洋,梅云.人工智能在箱包设计中的应用与创新[J].西部皮革,2024,47(05):77-79.
[2]朱丽娜,郝童.箱包视觉传达设计中功能性与艺术性的协调关系[J].西部皮革,2024,47(04):89-91.
[3]王烜琛.基于交互设计理念的智能箱包设计研究[D].北京服装学院,2022.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)