.jpg)
传感和矢量地图协同支持的停车场车辆定位系统分析

吴利刚
上海吉图软件开发有限公司
前言:近几年,基于地图辅助的空间定位技术快速发展,该技术可以借助地图约束提高空间定位精准度、稳定性。越来越多学者开始研究基于地图辅助的空间定位。如滕志军(2024)面对路况重叠的高架区域,提出计及车辆信息的隐马尔可夫地图匹配优化算法,有效解决定位无匹配现象[1]。魏东岩(2025)立足复杂场景不同类型区域,提出基于地图轻量化的粗-精级联匹配定位方法,为高精度定位研究提供参考[2]。相关研究为本研究关于矢量地图在车辆定位中的应用研究提供理论支持。但是,现有研究多建立在已有环境地图基础上,无法满足空间平面精准定位要求。因此,本研究创新引入二维激光雷达传感器,整合二维激光雷达与矢量地图模型,打造更精准、稳定的停车场车辆定位系统。
1 停车场车辆定位系统的重要性
停车场车辆定位系统是一种通过现代技术手段实时追踪停车场内车辆位置的系统,系统的重要意义见图1
局部二维平面直角坐标系(见图3)的定义。
图1 停车场车辆定位系统的重要性
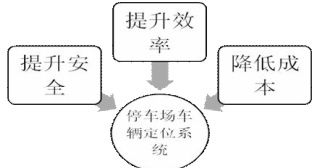
由图 1 可知,停车场车辆定位系统的应用,不仅可以提升安全、效率,而且可以降低停车场运营成本。具体表现为:停车场车辆定位系统可实时监控车辆位置、轨迹、速度,有效发现闯入禁限行位置、超速行为以及死角、急转弯等盲区,降低违规碰撞事故发生概率;停车场车辆定位系统可实现精准时间统计,并结合空间信息给出广告投放建议,增加停车场附加价值;停车场车辆定位系统可在实现车辆精准定位的基础上,分析停车数据,动态调整车位,避免过多空置影响空间利用效率。同时,系统可在短时间内获取车辆位置信息,结合车辆使用规律优化停车高峰时段车辆行驶路线,提高管理效率。
2 传感和矢量地图分析
2.1 传感分析
传感是一种以一定精确度将被测量转换为与之关联的某种物理量的测量装置。在停车场车辆定位系统构建时,主要应用二维激光雷达传感器。二维激光雷达传感器是通过向传感器周边障碍物发射并返回激光束判定传感器与目标障碍物的位置关系以及双方距离,主流二维激光雷达传感器方法涉及相位延迟法、脉冲式飞行时间法、三角法等[3]。综合考虑激光工作模式、测距精度、测距范围、采样频率、抗环境光能力、成本与测距复杂度,结合停车场车辆定位要求,选择近距离精度高、测距复杂度低、连续工作、采样频率中等、成本较低的基于三角测距的二维激光雷达传感器,运行原理见图2。
图2 基于三角测距的二维激光雷达传感器运行原理
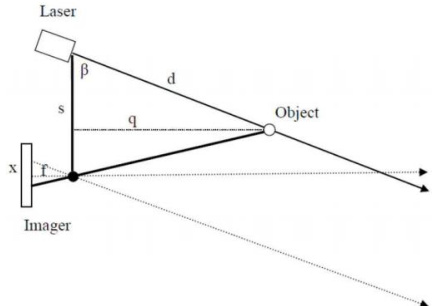
由图2 可知,β表示基于三角测距的二维激光雷达传感器发射激光角度; q 为停车场内目标车辆与二维激光雷达传感器的垂直距离;d 为传感器与停车场内目标车辆对象(Object)之间的距离;x 表示成像仪 (Imager )成像平面;f 为摄像头焦距;s 为激光发射器(Laser)与摄像头焦点之间的距离。基于三角测距的二维激光雷达传感器运行主要是按照β角发射激光,激光遇目标车辆反射到  根据基于三角测距的二维激光雷达传感器运行原理,选择集激光雷达、USBType-C 数据线、USB 转接板为一体的开发套件,激光雷达经 3.3V 电平串口开展信息通信,设定信号低电平(电压 <0.5V )最小值与最大值分别为0V、0.5V,信号高电平(电压>1.8V)最小值与最大值分别为1.8V、3.4V,波特率典型值为230400bps。同时,根据360°旋转扫描测距要求,定制传感器测距频率与范围,测距频率最小值为 4kHz,对应测距范围为 0.1m~16.00m ;测距频率典型值为 8kHz,对应测距范围为 0.26m~16.00m ;测距频率最大值为9kHz,对应测距范围为 0.28m~16.00m 。
根据基于三角测距的二维激光雷达传感器运行原理,选择集激光雷达、USBType-C 数据线、USB 转接板为一体的开发套件,激光雷达经 3.3V 电平串口开展信息通信,设定信号低电平(电压 <0.5V )最小值与最大值分别为0V、0.5V,信号高电平(电压>1.8V)最小值与最大值分别为1.8V、3.4V,波特率典型值为230400bps。同时,根据360°旋转扫描测距要求,定制传感器测距频率与范围,测距频率最小值为 4kHz,对应测距范围为 0.1m~16.00m ;测距频率典型值为 8kHz,对应测距范围为 0.26m~16.00m ;测距频率最大值为9kHz,对应测距范围为 0.28m~16.00m 。
2.2 矢量地图分析
矢量地图是约束停车场车辆轨迹的主要信息源之一,本质上是一种基于点、线、面等几何要素表示地理要素的地图,地图中每一对象均具有轮廓、颜色、大小、形状等属性[4]。矢量地图的构建需要经过数据采集、完善矢量地图数据结构、道路拓扑关系生成等几个环节。
1)数据采集。在停车场环境内,以某一道路节点为原点,以正北方向为 X 轴,以正东方向为 Y 轴,进行
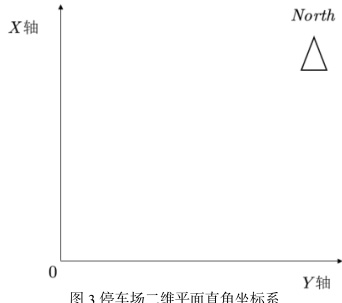
由图 3 可知,在停车场二维平面直角坐标系内,仅考虑节点数据与道路数据,将实际道路抽象为线段并赋予长度、宽度属性,利用直线截距、斜率进行描述。随后,利用线段首段、尾端两个点的坐标计算所在直线方程,其中,首端、尾端为停车场内每一道路首尾节点的尽头。计算公式如下:
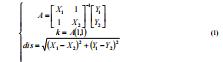
式(1)中,A 为结果矩阵;X1, Y1 为停车场内道路首点坐标;X2, Y2 为停车场内道路尾点坐标;k 为停车场内道路斜率;dis 为停车场内道路长度。根据式(1),沿着从首点到尾点的顺序,人工测量停车场道路长度与方位角。
2)为记录停车场内道路与道路邻接关系,考虑几何数据、拓扑数据,完善矢量地图数据结构,见图4。
图4 停车场矢量地图数据结构
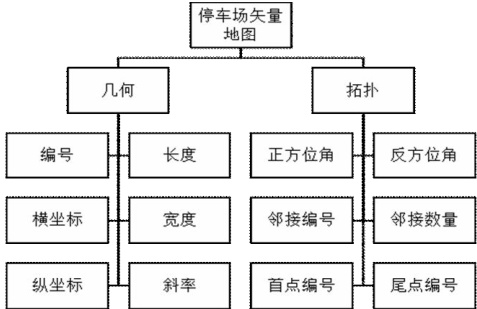
由图 4 可知,矢量地图数据类型包括几何数据、拓扑数据两种,可以分别存储。比如,对于几何数据,以X、Y 分别表示道路横坐标、纵坐标并存储在表格中。
3)在明确停车场内道路属性信息后,根据道路与道路交点关系,沿着“第 i 条道路”“全局搜索”“第 j条道路与第i 条道路有交点m”“m 到j、i 的距离是否为 0∗ ”“是则判定i、j 之间存在拓扑关系”“将j 添加到i 的邻接道路列表”的顺序,生成拓扑关系。
3 传感和矢量地图协同支持的停车场车辆定位系统
3.1 定位系统构建
传感和矢量地图协同支持的停车场车辆定位系统构建重点是设计停车场矢量地图数据模型、停车场矢量地图物理存储格式并定义停车场地图数据访问接口。
1)在明确停车场内道路与道路拓扑关系的基础上,利用面向对象设计的Parking Lot 算法,构建停车场矢量地图数据模型。在模型构建前,将需求抽象为不同的类,包括Parking Lot(停车场)、Parking Space(停车位)、road network(路网)。其中,Parking Lot 是系统的核心,以层作为一个 Parking Lot,每一个 Parking Lot 由 ParkingSpace、road network 构成,多个Parking Lot 以独立坡道连接成多层停车场。根据多层停车场路网联通性要求,将数据模型具体化,捆绑地图基本要素、核心要素与附加属性。即在基于三角测距的二维激光雷达传感点云地图数据匹配的基础上,从线段表示着手,增加矢量地图约束,局部线段属性参数见表 1 。
表1 停车场矢量地图提取线段属性参数(局部)

表1 中,线段与其他线段存在连接关系,置于1,线段与其他线段不存在连接关系,置于0。考虑激光雷达传感扫描停车场现实环境存在遮挡,导致扫描数据分割,需要以不同扫描帧为对象,确定对应线段,方式如下:

4 结束语
综上所述,多层停车场定位场景下,单一环境地图方法无法满足高精度定位要求。因此,本文利用传感和
矢量地图,抽象道路线段并进行分段约束,构建可扩展的停车场矢量地图数据模型,有效解决停车场定位数据误差累计问题。未来,将进一步研究停车场定位系统的硬件改进,实现更加精确、智能的停车定位管理。
参考文献:
[1]滕志军,皇甫泽南,王安晨.计及车辆信息的隐马尔可夫地图匹配优化算法[J].汽车技术,2024,55(12):15-22.
[2]魏东岩, 巨柳荫,纪新春,等.面向复杂场景的地图轻量化与匹配定位方法[J].中国惯性技术学报,2025,33(02):114-123.
.jpg)
.jpg)
.jpg)
.jpg)