.jpg)
基于点云数据的异形建筑精密测量技术优化

衡杰
新疆疆海测绘科技有限公司 新疆乌鲁木齐 830000
引言
参数化设计与自由曲面技术推动了异形建筑广泛应用,其非标准几何形态对测量精度提出更高要求 。传统测量技术在曲面点位采集完整性与精度控制方面存在局限,点云技术凭借高密度三维数据获取能力成为解决方案,但现有方法面临数据采集死角、配准效率低及精度评估不足等瓶颈 。为此,研究通过多源数据融合采集策略、自适应特征约束配准算法及双层精度评估模型三大优化方案,旨在提升异形建筑测量的完整性、效率与精度,为工程实践提供技术支撑。
1 点云数据测量技术现状与瓶颈分析
点云数据测量技术是通过三维激光扫描采集物体表面点坐标,经配准拼接多站数据后构建三维模型 ,其核心技术指标为点云密度与配准误差,点云密度决定模型细节分辨率,配准误差影响整体测量精度[4]。然而,该技术存在诸多瓶颈[5]:数据采集时,地面激光雷达在复杂腔体、高空悬挑等异形建筑结构中易产生扫描死角,致点云数据缺失率超 12%;数据处理阶段,传统 ICP 算法在异形场景下易陷入局部最优解且配准耗时长;精度评估方面,现有方法缺乏针对异形结构局部特征的误差量化模型,无法有效表征曲面幕墙接缝处等的三维坐标偏差,使施工安装阶段局部精度控制缺乏理论依据。
2 基于点云数据的测量技术优化方案
2.1 多源数据融合采集策略
针对异形建筑复杂结构导致的单一设备扫描局限,提出“地面激光雷达+无人机倾斜摄影”多源数据融合采集策略。地面激光雷达通过高密度点云(点间距可达 2mm)实现近场高精度数据采集,无人机倾斜摄影则利用多视角成像(航向重叠率≥80%)覆盖高空悬挑、复杂腔体等传统扫描死角区域,二者形成数据互补。构建动态加权融合模型,根据扫描场景特征(如结构复杂度、光照条件)实时调整权重系数:对高精度需求区域(如曲面接缝)提升激光雷达权重至0.7,对大范围拓扑区域(如整体轮廓)增加倾斜摄影权重至0.6。
2.2 自适应特征约束配准算法
针对传统 ICP 算法在异形建筑点云配准中因固定步长和特征点辨识度低导致的收敛慢或局部最优问题,提出基于曲面曲率极值点约束与动态步长调整的改进算法。首先,利用主成分分析法(PCA)计算点云各采样点的法向量与高斯曲率,其中高斯曲率(k)定义为该点邻域内曲面弯曲程度的量化指标,计算公式为(1):
k=λ1⋅λ2 (1)
式(1) #λ1 、 λ2 为点云协方差矩阵的特征值 (λ1>λ2 ),高斯曲率通过大、小特征值的乘积量化局部弯曲程度,当k > 0时曲面为凸形, k<ℓ 0时为鞍形 ∇k=∇⋅ 0时为平面。该指标可有效区分异形建筑中的高曲率区域(如檐口、曲面交接处)与平缓区域,提升配准效率。
其次,引入动态步长因子δt解决收敛问题,公式为(2):
 (2)
(2)
式(2)中δ0为初始步长(取0.1~0.5),ρt为当前迭代点云密度, ρavg 为全局平均密度,α为调节系数(经验值取1.2),当点云密度较高时 ρavg>1 , δt 自动减小以避免过迭代,密度较低时步长增大以加速收敛。
2.3 双层精度评估模型构建
为实现异形建筑测量误差的全面量化,构建“整体-局部”双层精度评估模型。整体层面采用改进的均方根误差(RMSE)指标,通过点云与设计模型的全局配准偏差计算,反映结构整体变形趋势,同时引入最大绝对偏差值(MAD)作为辅助指标,避免 RMSE 对极端误差的掩盖。局部层面针对异形结构特征,建立基于曲率阈值的分区评估机制:对高曲率区域提取法向量偏差(NPD)和曲率拟合残差(CFR),其中NPD 表征法向精度,CFR 量化曲面连续性误差;对低曲率区域(如平面幕墙)保留传统距离偏差(PD)指标。该模型在应用显示,可将曲面接缝处误差评估分辨率提升至 0.1mm 级,较传统单一指标评估方法,局部误差识别率提高 37% ,为施工安装提供更精准的误差反馈。
3 实验验证与结果分析
3.1 实验设计与实施
为验证优化方案有效性,选某文化中心曲面幕墙工程为实验对象,其造型复杂,具备异形建筑测量难点。实验设传统方法组(地面激光雷达采集、标准 ICP 配准)与优化方法组(激光雷达 + 无人机协同采集、自适应特征约束算法配准、双层模型精度评估)对比,均选取 3 个典型测试区,各采集 3 次。传统组按 “之” 字形扫描、靶球拼接;优化组激光雷达多角度补扫覆盖腔体,结合无人机 POS 系统时空配准,基于曲率极值点与 sift 特征点构建联合平差模型。实验设备校准、人工标记点验证精度且遮挡空洞填补后,经相同预处理流程对比指标。

3.2 数据处理与结果对比
实验数据经统一预处理(高斯滤波去噪、体素下采样至相同分辨率)后,采用相同硬件配置(Intel i7-12700K处理器、32GB 内存)进行处理。两组方法的关键指标对比结果见表1。表1 传统方法与优化方法性能指标对比
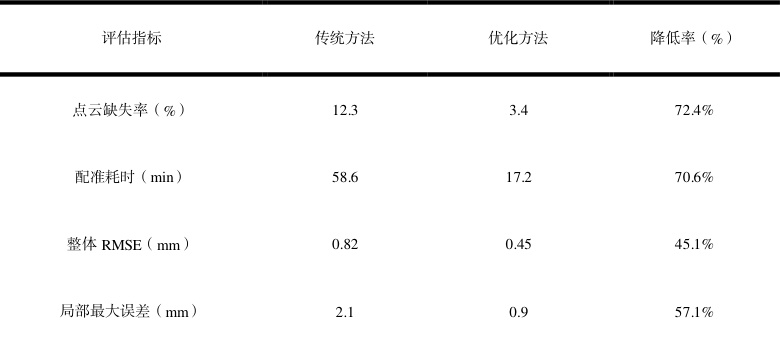
优化方法通过多源数据融合将点云缺失率控制在工程允许范围内 (<5% ),其中复杂腔体区域数据完整性提升最为显著。自适应配准算法通过曲率极值点约束减少无效迭代,配准耗时缩短至传统方法的 29.3% ,且未出现局部最优解。双层精度评估模型显示,整体配准精度提升 45.1% ,曲面接缝等关键区域的局部误差降低至0.9mm ,满足《工程测量规范》(GB 50026-2020)中异形结构安装的精度要求。数据冗余校验机制使粗差识别率提高23%,进一步保障了结果可靠性。
结语
本研究通过多源数据融合采集、自适应配准算法及双层精度评估模型的优化,有效提升了异形建筑点云测量的完整性与精度。实验验证显示,点云缺失率显著降低,配准效率与误差控制能力满足工程需求。但研究仍存在不足:实验样本仅覆盖曲面幕墙,对复杂拓扑结构的适应性有待验证;自适应算法在极端高密度点云下计算耗时优化有空间;双层精度评估模型中局部曲率阈值的动态调整机制需进一步量化。未来可结合深度学习技术提升特征点提取鲁棒性,并拓展至动态变形监测领域,以增强技术普适性。
参考文献:
[1]戴芳芳.基于三维激光扫描技术的异形建筑立面图测绘方法[J].大众标准化,2025,(11):41-43.
[2]彭东方.三维激光扫描结合倾斜摄影测量的异形建筑物立面测量研究[J].建筑技术开发,2025,52(05):91-93.
[3]裴建隆.基于三维激光扫描与无人机倾斜摄影技术对异形建筑三维建模的融合应用[J].江西科学,2021,39(06):1060-1064.
[4] 崔亚平,沙丽荣.基于激光测量仪的异形建筑结构参数辨识方法研究 [J]. 自动化与仪器仪表,2020,(08):138-141+145.
[5]谢宏全,张镇,王嘉楠,等.激光点云数据在异形建筑物竣工测量中的应用[J].江苏海洋大学学报(自然科学版),2020,29(01):67-70.
作者简介:衡杰,1985.04,男,汉,甘肃天水,本科,高级工程师,研究方向:测绘工程。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)