.jpg)
基于 OpenMV 视觉模块与 Arduino 的光照自适应的智能快递小车系统设计

田煜
浙江工贸职业技术学院
0 引言
随着电子商务的发展,物流行业的快速崛起,随之而来的快递配送面临这人工成本高,效率低等问题,智能快递小车成解决这一问题的有效手段。
光照因素是制约视觉识别技术可靠性的关键因素。针对这一问题,国内外学者进行了大量研究。ZHANG[1] 等人基于 Retinex 理论设计了一种图像增强算法,有效改善了低照度下的图像质量;黄亮 等人提出一种改进局部自适应阈值分割算法;这些方法仅从算法层面进行处理,未考虑硬件层面的补偿措施;黄凯文 [3]、朱铝芬 [4] 等人在进行智能小车设计时并未考虑光照因素对视觉模块的影响,因此本文设计基于视觉识别定位和红外循迹的智能小车,并考虑光照因素采用硬件光照补偿 LED系统和算法相结合的方式提升图像精度。
1 系统总体设计
智能快递配送小车的系统架构如图1 所示。系统主要由主控制器视觉识别模块、红外循迹模块、超声波避障模块、电机驱动模块、光照调节模块组成。
图1 系统框架图
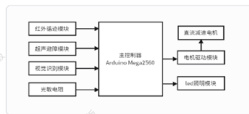
主控制器采用 Arduino Mega 2560,负责协调各模块工作,确定小车送货路径,控制小车运动。视觉识别采用 OpenMV 视觉模块,负责二维码识别和颜色识别。红外循迹模块由4 路TCRT5000 红外传感器组成,实现路径跟踪功能。超声避障模块采用 HC-SR04 超声波传感器,实现全方位障碍物检测。电机驱动模块采用L298N 驱动芯片控制直流减速电机。光照调节模块由光敏电阻和可调光 LED 组成,LED 由 IRF520 驱动模块实现根据环境光照强度自动调节补光强度。
2 硬件设计
2.1 OpenMV 视觉识别模块设计
本设计视觉识别采用 OpenMV 视觉识别模块,该模块基于 Python语言进行开发,集成了专用图像处理加速器,可高效运行滤波、阈值分割、特征检测等算法。
OpenMV 模块通过 TX(发送)和 RX(接收)引脚与 Arduino 通信,实现全双工数据传输。
2.2 光照调节模块设计
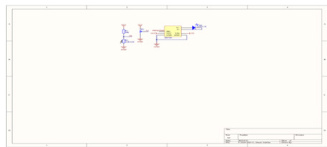
针对光照变化对识别效果的影响,本系统设计了主动可调光 LED照明系统。该系统的调光模式有自动模式和手动模式两种。自动模式下系统通过 1 个光敏电阻实时检测环境光照强度,由 Arduino 生成 PWM信号控制 1 个 LED 灯带亮度,使环境光照强度保持在一定值范围内;手动模式下系统可通过调整电位器调整LED 亮度,从而调节光照强度。本设计中的 LED 灯带采用 IRF520 驱动模块进行驱动 , 其硬件接线图如下图2 所示。
图2 光照调节模块接线图
2.3 红外循迹模块设计
本设计采用的红外循迹模块由 4 路 TCRT5000 红外传感器组成,通过检测是否反射回红外光线,输出高低电平,识别地面的黑白线实现循迹。
2.4 电机驱动模块设计
本设计的电机驱动模块采用采用 L298N 双 H 桥驱动模块,可同时驱动两个直流电机,直流电机采用两个额定电压为12V 的370 直流电机,L298N 驱动模块通过 Arduino 的 pwm 信号和数字信号控制转速和转动方向。
2.5 超声波避障模块设计
本设计避障模块采用四个 HC-SR04 超声波模块,分别在小车的前后左右,当检测到障碍物距离小于安全距离时,Arduino 会控制电机采取停止、转向等动作。
3 软件设计
系统软件程序基于 Arduino IDE 开发环境编写,主要包含主控制程序、视觉识别模块图像处理程序、路径规划循迹程序等。
3.1 主控制程序设计
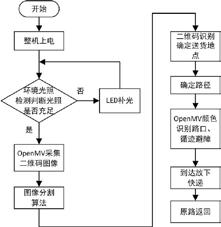
系统的主控制工作流程为:光照调节模块识别光照强度→ 0penMV 识别二维码并发送目标位置信息 $$ Arduino 根据目标位置规划路径→红外传感器进行路径跟踪→超声波传感器实时检测避障→到达目标位置完成配送→完成后原路返回。
主控制流程图如下图3 所示。
3.1 视觉识别模块图像处理算法
本设计图像处理算法选择阈值分割算法,阈值分割法主要可分为全局阈值分割法和局部自适应阈值分割法,两种阈值算法适用情况如表1 所示。
表1 全局阈值分割法和局部自适应阈值分割法特性对比

综合考虑算法效率和适用场景,选择光照稳定的情况下使用全局阈值。光照变化大、不均匀的情况下局部自适应阈值。
3.2 路径规划循迹程序设计
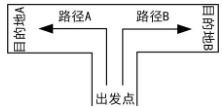
本系统中以两种路径为例,路径设置情况如下图4 所示
图4 路径示意图
控制流程图如下图5 所示
本设计的导航采用 OpenMV 视觉模块和红外循迹模块的混合导航模式。其工作流程为:OpenMV 识别二维码并发送目标位置信息(A/B)→Arduino 根据目标位置选择路径→小车循迹出发→到达路口,OpenMV检测颜色标记,并根据当前路径和颜色标记发决定动作→ Arduino 收到数据执行左/ 右转→OpenMV 检测颜色判断到达目的地→原路返回。

图5 路径规划循迹控制流程图
4 结束语
本文针对光照对视觉模块的影响,设计了一种基于 OpenMV 视觉模块与 Arduino 的光照自适应智能快递小车系统。本设计从硬件和软件两方面考虑光照因素的影响,为智能小车模块设计了光照自适应模块,并将图像分割算法运用与图像处理中,增强系统对光照因素的适应能力。本系统采用 OpenMV 视觉模块二维码识别定位、颜色识别判断,和红外模块循迹的混合方式路径导航,具有较高的可靠性。该智能小车具有成本低、效率高、稳定性高的特点,在物流行业快速发展的现在具有较好的经济价值。
参考文献
[1]ZHANG Yonghua, ZHANG Jiawan, GUO Xiaojie. Kindling the darkness: a practical low-light image enhancer[C] // Proceedings of the 27th ACM International Conference on Multimedia. New York: ACM, 2019:1632−1640.
[2] 黄 亮,郝颖明. 不均匀光照下的合作目标图像分割方法[J].计算机应用 , 2024, 44(S1): 229 - 234
[3] 黄凯文 赵 煜 黄 玲 周金伟 . 基于机械视觉的 Arduino 智能物流配送车 [J]. 河南科技 .2021.8
[4] 朱铝芬,羊井广 . 基于视觉技术的智能快递分拣小车的研制[J]. 物联网技术 , 2095-1302.2021.09.002
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)