.jpg)
基于视觉识别的跟随监护小车设计

陈升宇 刘禹凡 兰保灵 刘仁杰 谢星月 汪宇康
武汉商学院 湖北省武汉市 430056
一、引言
随着人口老龄化的持续增长,国家与社 会赡养老人的压力增大[]。为了积极应对《“十四五”国家老龄事业发展和养老服务体系规划》中明确提及的对“智能监测设备”的需求,智慧养老政策采用了非穿戴式视觉监护技术,有效解决了传统监护设备存在的侵入性问题,为老年人营造了一个更为舒适自然的居住环境,如图- 所示。
图1- 1“十四五”国家老龄事业发展和养老服务体系规划

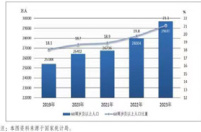
我国正加速迈向深度老龄化社会,截至2023 年底,60 岁及以上人口已达2.97 亿,如表1-3所示,占总人口的 21.1% ,而且独居、空巢老人规模持续扩大,跌倒、疾病等意外风险频繁发生。传统监护方式由于隐私侵犯、响应延迟、成本高昂等问题难以契合实际需求,国家出台多项政策推动智慧养老产业发展,然而市场仍缺少低成本、高精度、非侵入式的监护解决方案。
表 1-3 2019-2023 年 60 岁及以上人口普查
本项目凭借视觉识别与自主导航技术,以“无感跟随 + 主动陪伴”作为核心,达成动态环境下的精准监护与情感交互。其社会价值在于缓解老龄化带来的照护压力,填补政策与技术之间的空白,同时为智慧养老产业提供高性价比的创新途径。
二、机械结构设计
2.1 阿克曼底盘设计
跟随监护小车采用阿克曼底盘设计。阿克曼转向是一种现代汽车的 转向方式,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎 [2]。如图 2-1 所示,小车采用“前轮转向 + 后轮驱动”的经典布局,非常适合在狭窄弯道中行驶。底盘框架选用合金材质,在实现轻量化的同时保证了足够的强度。转向机构通过四连杆结构与舵机相连,极大地提高了转向精度。
图2-1 阿克曼底盘 图 2-2 车身结构
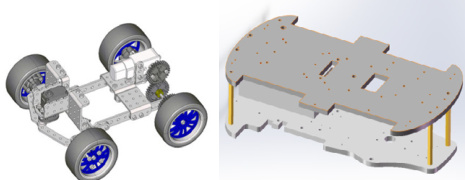
后轮搭载双20W 直流电机,并搭配L298N 驱动模块,支持256 级PWM 调速,可实现 0-2m/ s 的平滑速度控制。车身结构设计注重轻量化与稳定性,采用多孔镂空铝镁合金底盘,表面的阵列式减重孔能降低小车的质量,同时通过拓扑优化,使抗弯刚度增大。中央集成式布线槽与设备开口减少了外置支架的使用,配合四根铜柱增强了结构稳定性。边缘圆角与渐变壁厚设计兼顾了应力分布与减重需求。并且后轮采用差速设计,使小车转向更加丝滑流畅,便于实现动态避障与视觉采集。如图 2-2 所示,框架采用 3D 打印尼龙材质,仅重 0.8kg,最大负载 2kg,支持快速部署传感器。前转向组件采用 12 辐镂空轮毂搭配轮胎,胎面横向沟槽纹路兼顾了抓地力与低滚阻特性。转向节通过拓扑优化形成 Y 型减重孔,连接部件采用 3D 打印关节轴承,整体设计较传统结构轻盈,并强化了结构可靠性。
2.2 摄像头舵机调节结构
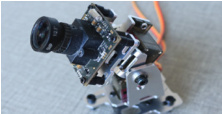
为提升视觉识别的灵活性和适应性,在摄像头安装部位增加舵机调节结构。如图2-3所示,该结构采用高精度数字舵机,通过支架与摄像头固定连接,可实现摄像头在垂直方向 ±90∘ 水平方向 ±30∘ °的旋转调节。舵机与主控系统相连,能根据目标位置变化自动调整摄像头角度。当小车跟随老人移动时,若老人位置偏离摄像头视野中心,主控系统会根据视觉识别算法反馈的偏差信息,向舵机发送控制指令,使摄像头实时追踪老人,确保老人始终处于视野范围内,提高复杂环境下的目标捕捉能力。例如,当老人转身或在室内拐角处移动时,摄像头可快速调整角度,避免目标丢失。
图2-3 摄像头舵机调节结构
同时,该结构具备手动调节功能,可通过遥控器或 APP 预设摄像头的监控角度范围,满足不同场景下的监护需求。在结构设计上,采用轻量化材料制作支架,减少对小车整体配重的影响,且舵机安装位置经过优化,避免遮挡摄像头视野和其他传感器的检测范围。
2.3 偏振片加装设计
一般摄像头在设计加工时就已经确定了其正常工作的光照强度范围,外界光强变化较大时,摄像头就失去了其性能。所以摄像头智能车对使用环境的光强有较大的依赖 [3]。在摄像头镜头前端加装可调节偏振片,以优化视觉识别在复杂光照环境下的性能。偏振片采用旋转式安装结构,通过微型舵机控制其偏振角度,可根据环境光线变化实时调整,有效过滤镜面反射光和杂散光,减少光线干扰对图像质量的影响。
例如,在阳光直射的室内环境中,地板或家具表面的反光可能导致摄像头拍摄的图像出现光斑或过曝区域,影响对老人轮廓和动作的识别精度。此时,偏振片可通过调整角度过滤掉特定方向的反射光,使图像中老人的特征更清晰,提升跌倒检测、步态分析等AI 算法的准确性。在夜间或弱光环境下,配合摄像头的红外补光功能,偏振片可减少环境中其他光源的干扰,确保对老人行动轨迹的稳定追踪。
该偏振片结构设计为可拆卸式,便于根据实际场景需求更换不同偏振率的镜片,同时不影响摄像头的正常维护和清洁。其控制逻辑与摄像头舵机调节结构联动,通过主控系统的光线传感器实时监测环境光强和偏振状态,自动完成偏振片角度的最优调整,无需人工干预。
三、软件系统设计
3.1 系统与开发环境
系统采用 Ubuntu 实时内核,确保传感器数据采集、电机控制等实时性要求高的模块能优先执行。流程图如图 3-1 所示,支持 VMware Workstation Pro 虚拟化部署,在 Windows 系统中搭建开发环境,通过共享文件夹实现宿主机与虚拟机的代码同步,配合 ROS 远程通信功能,可直接控制实体小车进行在线调试,减少开发环境与实际运行环境的差异。
图3-1 小车开发环境

主开发语言为 C++,利用其高效性满足实时处理需求;辅助开发采用 Python,用于数据可视化、脚本自动化和快速原型验证。视觉处理集成 OpenCV,实现图像滤波、特征提取、畸变校正等基础操作;深度学习推理基于PaddlePaddle2.4 框架,支持模型训练与部署一体化。针对龙芯久久派开发板的国产化硬件架构,对底层驱动进行适配。修改 UART、I2C 等外设接口的设备树配置,确保激光雷达、IMU 等传感器能正常通信。
3.2 移动端监控与交互模块
为实现家属对老人状况的远程实时监护,开发了配套的移动端 APP,使其具备实时视频监控、一键通话交互和智能报警与响应的功能。
通过小车搭载的通信模块,将摄像头采集的实时画面加密传输至云端服务器,家属在APP 端经身份验证后可查看老人动态。如图 3-2 所示视频流采用高效编码压缩技术,在保证一定清晰度的前提下,控制带宽占用,适配不同网络环境。同时支持多档画质切换与画面缩放,满足流量敏感型用户需求。
图3-2 小车终端结构
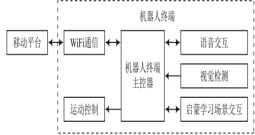
小车内置麦克风与扬声器,家属在 APP 端点击“通话”按钮即可发起双向语音通话,系统采用回声消除与降噪算法,确保嘈杂环境下的清晰沟通。此外,支持“语音留言”功能,家属可录制简短语音,小车收到后通过扬声器播放,解决老人不便操作设备的问题。
当视觉识别算法检测到跌倒、长时间静止等异常情况时,系统自动触发多级报警机制。小车会先向家属 APP 推送含定位与截图的报警信息,然后会拨打预设的紧急联系人电话,最后联动社区养老服务平台,发送包含具体地址与事件类型的救援请求。家属可在 APP 端手动触发报警,也可设置“安全区域”,当老人超出范围时自动预警。
该模块采用端到端加密技术保护视频与通话数据,符合相关法规要求。同时设计“免打扰模式”,家属可设定特定时间段关闭视频推送,仅保留紧急报警功能,平衡监护需求与老人隐私。在移动数字经济快速发展和社会老龄化日益加深的背景下 , 移动端适老化产品的情感化设计不仅是技术发展的趋势, 更是促进社会包容性的重要手段 [4]。
3.3 核心技术
针对老年人日常活动中可能遇到的多样化环境,小车构建了“多模态感知 + 智能适配”的技术体系,确保在复杂路段和极端光照条件下的稳定运行。在光照适应方面,采用“硬件调节 + 算法补偿”双重策略。硬件层面通过微型舵机控制偏振片角度,过滤玻璃反光、地面眩光等干扰;算法层面对逆光、弱光场景进行分区域亮度补偿,结合帧间滤波消除灯光频闪影响,确保复杂光照下目标识别稳定。
而且小车交通场景处理能力突出,搭载轻量化 YOLOv5s 模型识别红绿灯,红灯时通过语音、灯光、震动三级提醒干预。斑马线识别融合视觉条纹检测与离线地图数据,进入过街模式后实时扫描来车方向,动态播报行进状态。
复杂路段应对采用“激光雷达 + 视觉语义分割”,精准识别坑洼、台阶等路面障碍,对人流密集区域启用多目标轨迹预测,提前调整路径保持安全距离。基于 OpenCV 和 PCL 设计并编写了能在实车上运行的多目标检测跟踪程序,算法平均耗时70ms 左右,能够满足实时性要求,并与规划程序实时通信,将检测结果传递到规划程序中[5]。系统通过 FPGA 加速核心任务,确保 50ms 内响应,关键传感器双备份设计与多重算法校验,形成安全冗余,为老年人出行提供全方位智能守护。
总结
基于视觉识别的跟随监护小车在设计上充分结合了机械结构与软件系统的优势,实现了对老年人的有效监护和跟随。机械结构采用阿克曼底盘设计,兼顾了灵活性和稳定性,轻量化的材料选择和优化的结构。多种高精度传感器的配备,为小车提供了准确的环境感知能力。软件系统通过先进的算法和技术,实现了对图像和传感器数据的高效处理、精准决策和稳定控制。多传感器融合技术提高了系统的可靠性和抗干扰能力,确保在复杂环境下也能准确识别目标和障碍物,实现稳定跟随和安全避障。
该小车的设计有效缓解了老龄化带来的照护压力,填补了政策与技术之间的空白。其非侵入式的监护方式保护了老年人的隐私,降低了传统监护设备的成本,使更多家庭能够负担得起。情感陪伴功能通过语音交互等方式,缓解了老年人的孤独感,提高了他们的生活质量。
参考文献
[1] 陈卫 . 中国人口负增长与老龄化趋势预测 [J]. 社会科学辑刊 ,2022(05):133- 144.
[2] 安旭 . 基于阿克曼底盘的无人车自主导航研究[D]. 哈尔滨师范大学,2023.
[3] 唐猛 , 肖鑫 , 叶天明等 . 偏振片在智能车摄像头道路识别中的应用 [J]. 物理与工程,016,26 (4):69- 71.
[4] 李咛, 贺俊淇, 周雅茹等. 移动端适老化产品的情感化设计研究 [J]. 西安建筑科技大学学报 ( 自然科学版 ),2025,57 (3):446- 453.DOI:10.15986/j.1006- 7930.2025.03.015.
[5] 叶刚 . 城市环境基于三维激光雷达的自动驾驶车辆多目标检测及跟踪算法研究 [D]. 北京 : 北京理工大学 .2016.
课题项目 :2025 年湖北省大学生创新创业训练计划项目 :SmartScan Car——基于视觉识别的跟随监护小车 ( 编号 :202511654110)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)