.jpg)
瞄标定物法在舰船探测设备零位检查中的应用

隋英军
92055 部队
舰船探测设备机械零位检查与调整也称为机械零位检查,目的是为了消除由传感器、设备安装造成的设备之间的机械零位不一致带来的系统误差。机械零位的对准实质上是参考系的对准。也就是说,系统中相关的单机设备在对目标位置的测量或武器发射装置的指向时,使它们实际使用的参考系与系统规定相吻合,保证系统的准确性。
一、参考系对准的主要内容
参考系对准。参考系对准包括原点对准、参考面对准和参考线对准。不同设备参考系的原点在设备安装时已经确定,彼此之间相对位置是固定的,不可调整,所以我们关心的是参考面和参考线的对准。在实际机械零位对准作业中,我们通常使用甲板坐标系进行参考面和参考线的对准。在甲板参考系中,甲板面和舰艏线在舰上很容易建立相应的基准。
参考面对准。舰船探测系统中的设备在对目标位置的测量或在确定武器发射装置的指向时,通常由平行于甲板水平面的旋回角和垂直于甲板水平面的俯仰角决定。俯仰角所在的平面由固定在设备上的俯仰轴所决定,总是与俯仰轴垂直。这种关系与参考系约定俯仰角所在的参考面垂直于旋回角所在的参考面是完全一致的。因此,参考面的对准,只需要进行旋回角所在的参考面对准就可以了。旋回角所在的参考面要求严格平行于甲板面基准平台,否则,俯仰角就会随着旋回角的变化产生相对于甲板基准面的变化,即不同旋回角对应的俯仰角误差不是一个固定值,而是一个正弦变化量,无法通过调整消除。由此可见,旋回角平面与甲板基准面的严格平行关系是舰炮机械零位对准的基础,对其检查通常称为“水平度检查”。差分电子水平仪的广泛使用,使水平度检查变得非常方便。常用差分水平仪测量精度一般都能达到2 秒以内,远高于系统精度要求,这里不进行讨论。
参考线对准。参考线对准包括旋回角的参考线和俯仰角的参考线对准。设备的旋回角通常采用舷角或方位角表示,因此设备旋回角的参考线对准主要是解决舷角或方位角的零位。甲板参考系中,舷角的参考线是舰艇的舰艏线。通常认为俯仰轴总是与旋回角平面平行,而俯仰角零位基准取其所在平面与旋回角所在平面交线。参考线对准目标是保证系统内相关设备的轴向一致性,所以也常称为一致性检查。
二、舷角和俯仰角检查的主要方法
在水平度检查符合标准的前提下,可以进行舷角和俯仰角零位检查。由于设备的舷角和俯仰角转动机构为刚性结构,所以不同设备在任意角度的对齐,可视作零位的对齐。俯仰角、舷角零位检查,首先要建立检查所需的参考值,作为被测设备的对齐基准。参考基准要求能够准确反映出目标位置的真实值,应具有较高的精度,通常要比待测值允许误差高 3 到 10 倍,普通经纬仪的角度测量精度为 2 秒以上,足以满足常见的校准需求,所以参考基准经常有经纬仪提供,即用经纬仪充当基准光轴。系泊情形下的参考线对准常用瞄星法和瞄标定物法。瞄标定物法需要考虑测量基准设备和被测设备的相对位置,进行数据修正,过程相对复杂,但受环境条件制约少,加上无人机技术的发展,该方法将更多被采用。
瞄星法。首先,在舰艇的左舷或右舷选择一颗适当高度的明亮星体,两名操作手分别操纵基准光轴设备和被测设备,使其光轴概略地对准星体,注意二者瞄的是同一颗星体。选择北方且仰角与所在地维度数值接近的星体比较理想,这样的星体在瞄准镜视场内移动较慢,方便后续对准作业;下一步,由指挥员协调基准光轴设备操作手和被测设备操作手分别操作设备从同一方向接近并同时对准星体,同时记下基准光轴设备和被测设备舷角(或俯仰角)。由于星体距离无限远,基准光轴设备与被测设备在舰艇上安装位置的不同可以忽略不计,基准光轴设备和被测设备舷角差值(或俯仰角差值)即为被测设备的零位误差。为了减小随机误差,要多测几次取平均值。
瞄标定物法。首先,在舰艇周围设置几个标定物,确定基准光轴设备、被测设备同标定物之间无遮挡,两名操作手分别操纵基准光轴设备和被测设备的光轴概略地对准同一标定物;下一步,由指挥员协基准光轴设备操作手和被测设备操作手分别操作设备从同一方向接近并同时对准标定物,同时记下基准光轴设备和被测设备舷角(或俯仰角);最后,根据基准光轴设备与被测设备在舰艇上安装的相对位置,对测量的数据进行修正,计算出设备对准时的真值,进一步计算出零位误差。同样,为了减小随机误差,要多测几次取平均值。
三、瞄标定物法在实际机械零位检查的应用
系泊状态下,瞄星法和瞄标定物法在机械零位检查中有各自的优势。瞄标定物法具有受外部条件限制少,作业时间方便协调的优势。
(一)瞄标定物法的理论基础
通常使用经纬仪作为测量基准设备。由于标定物设置在有限距离内,且经纬仪与被测设备不可能架设在相同位置,所以两个设备测量同一标定物的旋回角和俯仰角存在差值,这个差值由测量设备和被测设备的相对位置决定的,需要进行修正,计算出被测设备对准时的真值作为调整时的依据。
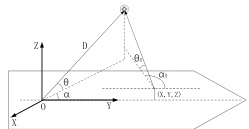
设不稳定舰艇参考系 O-XYZ 的原点在经纬仪所在的位置,经纬仪距标定物的距离为 D;被测设备所在位置在该参考系的坐标为(X,Y,Z),经纬仪测量标定物的舷角为 a ,俯仰角为 θ ,则标定物到被测设备的距离在三个坐标轴上的分量分别为:
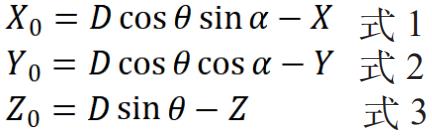
被测设备对准时相应的舷角和俯仰角真值应为:
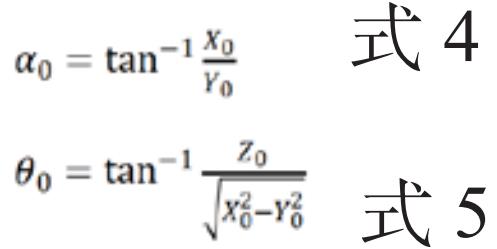
被测设备实际测得标定物的舷角值与的差值即为舷角零位误差。同理,被测设备实际测得标定物的俯仰角值与的差值即为俯仰角零位误差。
(二)基准参考坐标系的建立
建立基准参考坐标系在舰炮标校实践中是经纬仪的架设。建立基准坐标系要求:原点置于舰艇艏艉线上;X 轴与舰艇艏艉线重合;坐标系的X-O-Y平面与舰艇基准平台保持平行。这样建立基准坐标系(架设经纬仪)可简化后续计算,减少舰艇横摇对测量结果的影响。
普通经纬仪的架设,难点在回转平面与舰艇基准平台平行度的调节,在舰艇系泊状态下,需要长时间反复调节。如果使用甲板经纬仪,这个过程简单很多。基本程序如下:在舰尾处使用三角架架设甲板经纬仪,使代表设备中心的激光点落在最后一块舰艏线标志板中心点上;将设备附带的水平传感器置于舰艇惯导室内的基准平台上,并使用线缆与甲板经纬仪主机相连;启动设备自动调平功能,设备将自动建立回转平面与舰艇基准平台的平行关系,此时代表设备中心的激光点可能稍微偏离舰艏线标志板中心点,调整设备位置,光点重新标志板艏艉线中心点;用甲板经纬仪目镜向舰艏方向观察尽量远的另一个艏艉线标志板,使视野内十字线对准标志板中心,按下方位“置零”按键,确定舷角零度,作为测量基准;进入俯仰校准程序,选择一个小且清晰的目标,按照系统要求,进行一次俯仰测量,再将目镜垂直方向翻转180 度,并进行 180 度水平旋转,重新做一次俯仰角测量,系统自动计算误差并进行修正。至此,甲板经纬仪架设完成,建立了符合测量要求的基准参考坐标系。
(三)零位误差的测量
在舰艇的一侧 1 到 3 千米远处设置标定物,60 米以下,标定物设置尽可能高一些,距离 1 千米、高 60 米对应被测设备仰角 3 度左右。标定物上设置点光源,方便夜间测量使用。同时设置角反射棱镜组,用于将甲板经纬仪发射的激光原路反射回来,以便甲板经纬仪对标定物的自动跟踪测量。甲板经纬仪对标定物持续跟踪测量,减少了对操作人员的协同要求,只要被测设备从某一方向瞄准标定物即可同时读取经纬仪和被测设备分别测量的数据,计算出零位误差。
在被测设备安装瞄星仪光学镜头,手动控制被测设备水平和上下转动,直至在瞄星仪显示屏上观测到标定物,使十字光标对准标定物中心,旋转瞄星仪光学镜头 180 度,观察整个过程中光标是否始终对准标定物中心,检验瞄星仪的性能。同时,甲板经纬仪操作手操作甲板经纬仪对准标定物,进入自动跟踪状态。
上述准备工作完成后,就可以测量数据了。被测设备操作手操作被测设备,使瞄星仪十字光标向左离开标定物中心适当距离,再缓慢靠近,直至对准标定物中心(注意不可越过),在被测设备控制台和经纬仪处同时读取舷角值。为了减小随机误差,重复做三次,连续记录三组数据,处理完成后取平均值,作为从左向右的单边目标舷角 a1 同理,测量从右向左的单边目标舷角 α2。则 |α1-α2| 是被测设备舷角的空回量, 是被测设备测量标定物的舷角值 α⋅⨀ 同理,得到被测设备测量标定物的俯仰角值 θ
向舰艇总体设计单位索取架设经纬仪的舰艏线标识板坐标和被测设备底座中心坐标关系,结合被测设备俯仰轴距离甲板高度和经纬仪高度,得到被测设备在基准参考坐标系中的坐标(x,y,z),甲板经纬仪测得的标定物距离、舷角、俯仰角,由式 1 至式 5 计算出被测设备测量标定物的舷角真值 α0和俯仰角真值 θ0,(α-α0)即为被测设备的舷角零位误差,(θ-θ0)即为被测设备的俯仰角零位误差。
(四)关于测量精度的说明
对于瞄星法测量零位误差,影响其测量精度的因数主要有经纬仪测量精度和人员操作误差。常用经纬仪精度在 1 秒以内,超出测量要求精度两个数量级,所以测量精度主要取决于人员操作水平。而瞄标定物法,由于是有限距离测量,所以影响精度的因素较多,包括甲板经纬仪的架设误差、被测设备相对经纬仪的坐标误差、人员操作误差、标定物的距离测定误差和近似计算等。根据对各种因素的综合考量并与瞄星法实测数据的多次比对,瞄标定物法测量零位误差的精度为:舷角误差不超过40 秒,俯仰角误差不超过 52秒(此数据来源于中国船舶重工集团公司第七零一研究所),满足测量精度要求。
参考文献:
[1] 傅冰 . 舰艇武器火控基础 [M]. 国防工业出版社 ,2017.
[2] 卢发兴 . 舰艇火控原理 [M]. 电子工业出版社 ,2023.
[3] 舒长胜. 舰炮武器系统应用工程基础[M]. 国防工业出版社,2014.
[4] 汪德虎 . 舰炮射击基础理论 [M]. 海潮出版社 ,2019.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)