.jpg)
基于单波束测深技术的航道水下碍航物探测方法

罗荣燊
广东省粤东航道事务中心梅州航道所 514000
0 引言
航道水下碍航物,对船舶的航行安全构成了极大威胁。对其进行精确检测,为航道疏浚和通航提供可靠的数据支持,对于保证水上交通的正常运行具有重要意义。
钱俊锋[1]等人利用雷达发出的高频电磁波,分析了其在各种地质情况下的应用,实现了对地下管道和岩石等障碍物的精确定位和识别。该方法具有无损检测的优点,能够迅速获取地下资料。但在实践中,由于地质条件的复杂性,会对电磁波的传输产生干扰,导致反射信号模糊,从而降低检测的准确性。此外,由于地质雷达对某些特殊物质,例如塑料等,其检测精度较低,很难对其进行准确定位。吴旭峰[2]等人将雷达、激光雷达、摄像头等多源信息融合,充分发挥其各自的优势和优势,提高城市复杂环境下的障碍检测能力。但多个传感器的数据在时空上都有一定的差别,在进行融合时必须进行准确的标定,否则会出现错误。此外,在复杂多变的城市中,存在大量电磁干扰,此部分干扰会对传感器的性能造成影响,从而导致数据的可靠性下降。
为解决现有方法的不足,实现对障碍物的精准探测,本文将基于单波束测深技术的应用,对航道水下碍航物探测方法展开设计。
1 航道水下碍航物探测中测深线布设
为满足碍航物探测需求,在进行水下碍航物探测时,应根据实际情况布设测深线。在进行测深线方位设计时,应注意测深线方位应与测量区内的流动方向相同,并尽量与等高线的整体方向相垂直。通过此种方式,可以更全面、细致地反映水下地形的变化。同时,应注意施工便利性,避免布置过多的短测线,造成不必要的工作量和费用。如在宽广、海流较平缓的水道中,依此法布设探深线,可有效地进行大范围水域的探深工作。
测深线距设计时,应考虑多种因素的影响。在测量时应考虑到被测量水体的重要程度、对水下地形的精细表达要求、水深与地形起伏情况、水底地质条件等。如使用单束水深装置,则主要测线间距应设在地图上等距,在平面水下可适当放宽。对于地形较为复杂的地区,测线间距要按比例尺的大小进行适当调节[3]。对于有暗礁、海难等有碍航物的海域,可适当缩短测线间距,以提高检测精度。
根据海底地形的起伏,在测量线上设置测点的间距。通常情况下,只要能捕捉到地表的微小变化即可满足需求,但不能将点之间的距离设置过近,否则会降低数据处理效率。在实际操作中,常用的点距设置方法有等距法、等时距法和人工法[4]。从点位分布均匀的角度出发,采用等间距法设计测点间距。计算公式如下。
J=n⋅dω(1)
公式中: J 表示测线长度; n 表示等距系数; d 表示测点数量。在此基础上,进行测深线的布设。测深线可分成三种类型:主测深线、辅助测深线、检验测深线。辅助测深线用于对关键地区进行加密,而检验线用于检验深度和位置之间有无系统误差和粗差,可以度量深度结果的准确性[5]。
主测深线的常用布设方式有:垂向水流轴线布设、与水流轴线成一定角度布设、平行水流轴线布设、扇形布设和螺旋布设等。采用不同的测深方式,其应用范围也不一样,如采用单光束测深仪,通常可应用于垂直线测深系统;与水流轴成一角度布置,多用于单光束测水深检测中,或用于较窄水道测量;多波束测深通常采用扇形布置法;螺旋式布局多用于弯道地段;但这两种布置方法,如平行流轴布置,则更适合于岛状或宽水域[6]。在实际测量中,要依据测深装置的工作原理及河床形态,选择适当的探槽方式,并以主测深线长度的一部分作为探深线长度的一部分。
通过科学、合理的布设探深线,可以为航道水下碍航物的探测提供准确而全面的水下地貌资料,从而达到对障碍物的精确探测需求。
2 基于单波束测深技术的回波干扰处理
在作业现场完成单波束测深的布置后,采集回波信号,对多次回波干扰进行处理。在实测过程中,根据采集到的各帧数据,可以得到换能器工作面上 500 次回波信号的强度,将其强度“Buf 值”[7]。在大量的数据中,应准确地找到首个回波信号的强度信息,求出该帧的距离,以此解决多个回波干扰。回波距离计算公式如下。

公式中: L 表示回波距离; X 表示回波点序号;表示当前回波帧分辨率。上述公式中,当前回波帧分辨率 p 主要是指回波点的位置序号, p 的计算公式如下。

公式中: δ 表示当前量程。回波在水体中传播时,受到鱼类、气泡、水草等外来物质的干扰,会产生微弱的回声。主要是由于此类干扰物质的体积较小,反射表面的介质较软,反射面比较小。在此种条件下,杂波的峰值强度量级一般 <80 。而普通的船体钢板,其反射波的强度一般 >150 。
根据此数值,设置临界点为 100。在探测到的回波峰值强度 <100 的情况下,判断为鱼类、气泡、水草等外来物质引起的干扰回波,并对其进行滤波处理。通过此种方式,去除水中异物对回波的干扰,提高单波束回波数据的精度,实现基于单波束测深技术的回波干扰处理。
3 水下碍航物探测
在水下碍航物探测中,单光束测深仪和声波多普勒测速仪具有较大应用潜力,利用换能器将声波发射到水体中,在传播过程中受到水下障碍物的影响,如礁石、沉船等。通过对传感器接收到的声波的时间差进行准确的测量,再与被测水体中的声波在被测水体中的传播速率进行对比,从而得到该海域的深度信息。单波束测深传感器到河床底部的深度和船的吃水深度存在下述关系:
S=s1+s2
公式中: S 表示航道总水深; s1 表示换能器至河底的水深; s2 表示有效吃水深度。上述公式明确了各参量与全水深的关系,而换能器到河床底部的深度,则可以根据声波在水中的传播速度和超声波收发的时间差进行计算。根据水中的回波在水中的传播速率,则按照下述公式,可以计算得到水下碍航物与探测装置之间的距离。表达式如下。

公式中: Z 表示水下碍航物与探测装置之间的距离; V 表示回波声速; t 表示回波传播时间。在此基础上,为实现对水下碍航物位置的精准探测,在上述内容的基础上,将探测结果与 GPS、INS等技术联合使用,根据测距结果,将其与水下空间坐标进行适配,以此种方式,即可实现对水下碍航物的精准定位。
4 对比实验
4.1 实验准备
为实现对设计方法在应用中效果的检验,选择某地区大型船舶航道作为施测水域,该水域的基本情况如下表 1 所示。
表 1 施测水域基本情况

通过现场勘察,发现在距水面 0.5m 的位置,可以满足本次实验的水下碍航物探测需求。在此基础上,利用本文设计的方法,进行测线的布设。设计中,如果测线间隔太小,虽然可以确保测试结果的准确性,但是会使采集工作量增加,工作效率下降;当测量线间隔太大时,插入点的精度会下降,很难保证测量结果的准确性。测区经过全面考虑后,主纵线沿着河道走向布置,测线间距 20m,测点间距 1m。检查线应与主要线路垂直,并至少 2 条。通过对水下测航轨迹分析,发现实际测得的数据为 107920 个。施测现场如下图 1 所示。
图 1 航道水下碍航物探测现场

在测量中,为确保采样信号的规范性,按照下述表 2,进行信号发射模块参数的设计表 2 信号发射模块参数设计
完成上述准备工作后,引进文献[1]、[2]方法,将其作为对照,进行航道水下碍航物探测方法的测试。
4.2 航道水下碍航物探测精度检验
对水道中障碍物的检测精度进行检查,是评价航道水下碍航物探测方法精度的重要指标。检验中,利用已有的高精度参考资料,例如干扰物体的模型资料,或权威的绘图资料,进行比较和分析。在检测过程中,会综合考虑仪器的系统误差、环境因素(水流、水温等)对检测信号的影响等。
通过对探测结果与实测资料的对比分析,掌握探测结果的偏差,判定探测方法精度能否满足航道安全和工程应用的需要。实验结果如下图2 所示。
图 2 水下碍航物的探测精度检验结果

从上述图2 所示的结果可以看出,在相同的测试条件下,应用本文方法进行水下碍航物的探测,探测结果的偏差相对较小。
4.3 探测信号强度衰减检验
探测信号强度衰减是实现水下信息精确提取的关键,在水道中探测障碍物时,其所发出的电磁波在水体中传输,由于受到水体的吸收、散射和与水下目标的作用,会使其逐渐衰减。
对三种方法应用后的探测信号强度衰减过程进行描述,如衰减趋势显著,容易造成实测信号与实际情况偏差较大。以此为依据,进行实验结果的分析,如下图 3 所示。
图 3 探测信号强度衰减检验结果
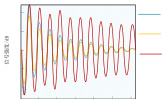
从上述图3 所示的结果可以看出,文献[1]、[2]方法应用后,探测信号的衰减趋势显著,虽然本文方法也无法避免探测信号强度的衰减,但其衰减幅度较小,不会对碍航物的探测与定位等造成影响。
5 结束语
单光束水深测量方法用于测量水道中的水下地形和障碍物,将单光束的声波发射到水中,在遇到水下或者障碍物的时候,将其反射回来,根据声波在水中的传播时间和流速,反演出深度等信息。为实现在复杂的水下地形环境中,对地形特性的全面精确描述,本文通过航道水下碍航物探测中测深线布设、基于单波束测深技术的回波干扰处理、水下碍航物探测,完成了此次设计。近几年,单波束水深测量技术得到了快速发展,在测量精度高、效率高、可获取三维信息等诸多方面具有明显的优势。未来,将持续进行此方面内容研究的深化,通过对其适应性进行分析与优化,提高常规测量技术的性能,以此种方式,保障航道安全。
参考文献
[1] 钱俊锋,徐波,高继武,等.基于探地雷达的地下障碍物探测处理技术应用研究[J].科技通报, 2024,40(11):27-32
[2] 吴旭峰,陆洋,刘玉虎.基于多传感器信息融合的直升机城市内障碍物主动探测方法[J].飞行力学, 2023, 41(2):64-70.
[3] 杨秀英,吴鸣晢,施裕斌,等.列车车载轨行区障碍物主动检测系统及其应用研究[J].城市轨道交通研究, 2024, 27(9):317-320
[4] 李红明.站台门间隙探测装置在全自动运行地铁线路中的应用[J].城市轨道交通研究, 2024,27(6):301-304.
[5] 孙齐,卞强,童余德.基于地磁匹配辅助导航的改进 A*算法路径规划[J].江苏大学学报:自然科学版, 2023, 44(6):696-703.
[6] 阮英杰,贺岩,吕德亮,等.激光雷达水下障碍物剖面图像处理方法[J].红外与激光工程,2024(7):118-129.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)