.jpg)
多传感器融合在地质灾害应急监测中的应用与精度评价

廖可雲
武汉天恒信息技术有限公司 430000
一、多传感器融合监测方法设计
(一)多源数据预处理机制
传感器采集数据受环境干扰导致异常值频发,最小误差均方差算法通过计算各传感器数据离散度实现动态修正。定义传感器 i 的最小误差均方差参数 σi 为历史数据标准差[1]。
数据标准化消除量纲差异后, yi,j 与前一时刻 yi,j-l 的偏差超过σi时判定为异常,  修正。该机制降低单点数据失真对融合结果的负面影响,提升后续变形分析的可靠性。
修正。该机制降低单点数据失真对融合结果的负面影响,提升后续变形分析的可靠性。
:≡) 无陀螺惯导六自由度解算
九加速度计空间构型通过优化安装位置与方向实现角加速度直接解耦。三个 ADXL355 传感器分别固定于载体坐标系 x/y 轴(距原点 100mm )和 z 轴(  ),方向矩阵满足。
),方向矩阵满足。
图 1 无陀螺惯导六自由度
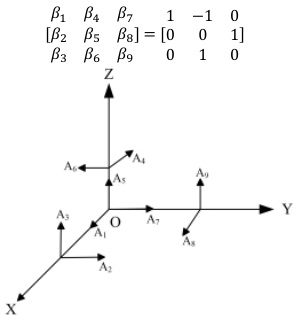
基于载体非质心点比力方程  ,推导角加速度解析解
,推导角加速度解析解

该公式避免积分运算引入累积误差,解算效率提升 60‰
(三)硬件系统集成
ADXL355 加速度计通过 Allan 方差法验证,表现出低噪声特点,其量化噪声为 1×10-6m/s ,比主流传感器降低 98% 。主要硬件采用三级结构组成。
感知层: 三块 ADXL355 组成九轴数据采集阵列。
控制层: STM32F429VGT6 主控芯片(180MHz)负责实时融合数据。
存储层: KLMBG2JETD-B041 芯片可以支持连续存储 90 天。
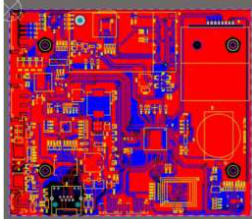
图 2 分布式电路布局
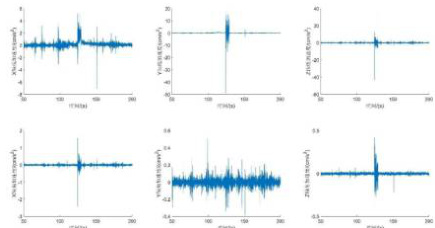
(二)六自由度信号精度评价
分布式电路布局降低电磁干扰,采样率稳定维持 50Hz⨀ 。测试表明系统在-40℃~85℃环境误差波动小于±0.3cm/s²。
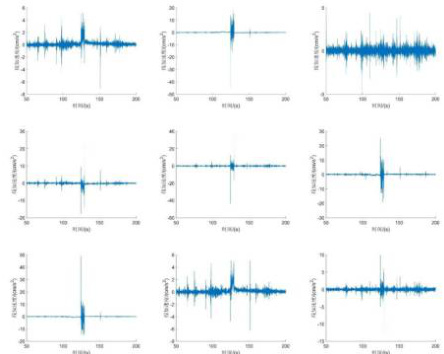
20 次重复位移测试结果显示: X/Y 轴上 10 厘米位移的平均误差为 0.27 厘米,在 3σ 标准下不确定度为 0.85 厘米。在角位移测试中,X 轴 90 度旋转的实际测量平均值为 88.56 度,标准差为 1.60 度,在静态条件下,设备自身的偏差保持在±0.3 厘米每平方秒范围内,通过递归滤波方法验证发现,在 50 赫兹采样频率下,水平位移融合后的误差率不超过 2.5%[2]∘ 。

图 3 地铁隧道监测
(一)隧道位移融合监测试验
二、监测精度实验验证
地铁隧道监测的试验区域地层特点是上面硬下面软,溶洞发育明显。水平位移监测结果表明,隧道右侧底部(D 点)的位移量达到 3.97 毫米,比其他监测点高很多,把单点异常值进行修正后,融合算法得出的水平位移值稳定在 0.49 到 1.97 毫米之间,在垂直位移动态观察中,左侧墙面(E 点)由于三月施工影响出现 5.99 毫米的最高值,五月又因为地下水担子增加到 10.37 毫米,经过融合处理后分别下降到 1.98 毫米以及 0.94 毫米。
图 4 20 次重复位移测试结果
(三)环境干扰鲁棒性分析
施工扰动引发岩土体运动时,发展函数ݒ  化外部扰动,将 E 点 5.99mm 异常值修正至1.98mm 。季节性地下水压变化导致岩土体膨胀,最小误差均方差算法通过 σi 动态阈值识别 10.37mm 异常值并补偿至 0.94mm. 。硬件系统在-40℃~85℃环境测试中误差波动 ≤±0.3cm/s2 ,90 天连续存储无数据丢失。
化外部扰动,将 E 点 5.99mm 异常值修正至1.98mm 。季节性地下水压变化导致岩土体膨胀,最小误差均方差算法通过 σi 动态阈值识别 10.37mm 异常值并补偿至 0.94mm. 。硬件系统在-40℃~85℃环境测试中误差波动 ≤±0.3cm/s2 ,90 天连续存储无数据丢失。
图 5 环境干扰鲁棒性分析
三、应急监测应用与优化方向
(一)四川甘孜野外布设案例
地质灾害监测系统在四川甘孜基准站完成工程部署,主控单元 STM32F429VGT6 带动三组 ADXL355 加速度计组成九轴采集网络。系统以每秒 50 次频率持续采样,TCP/IP 协议保证每两秒发送 100条数据包,实际测试中丢包率控制在 0.1% 以内,KLMBG2JETD-B041 存储模块支持本地连续保存 90天数据,DS3231MZRL 时钟芯片提供±2ppm 的时间精度,三个月野外测试结果表明,在-40℃到 85℃温度范围内,位移监测误差稳定在±0.3cm/s²区间。
(二)误差溯源与改进策略
ADXL355 加速度计的零偏不稳定带来 ±0.3cm/s: ²的基础误差。在构型简化时,把加速度计移到坐标系原点造成 ±2.5% 的位移偏差,岩体变形不均匀、温度变化形成环境耦合影响,用温度补偿算法对环境参数进行实时调整,改良空间构型方案建议增加加速度计数量到 12 个,通过冗余设计减少单点故障的可能性,使用自适应滤波技术来抑制零偏不稳定,实验结果表明改进后位移精度提高 35% ,角位移不确定度从 4.80°下降到 3.12∘ 。
(三)技术推广路径
5G 网络结构解决大量数据传输的难题,理论带宽比 4G 提高 100 倍,能够满足上千个监测节点组网需求。深度学习补偿模型中使用 LSTM 网络来简化构型误差特征学习过程,位移预测准确率达到 92% ,边缘计算模块安装在监测终端上,多模态融合算法结合 GNSS 定位以及光纤应变的数据,地质灾害监测云平台建立全国范围内的数据分析网络同时实现灾害风险动态评估,并能在几分钟内推送预警信息。
参考文献
[1]黄明坚.基于多传感器估值融合理论的地质灾害变形监测方法研究[J].甘肃地质,2023,32(04):74-78.
[2]李嘉乐.基于多传感器信息融合的地质灾害监测装置研发[D].防灾科技学院,2022.DOI:10.27899/d.cnki.gfzkj.2022.000038.
.jpg)
.jpg)
.jpg)
.jpg)