.jpg)
堆取料机无人化运行辅助技术的研究

钱云芳 施亮亮
南通润邦重机有限公司
l 概述
堆取料机要实现无人化运行,除了机器本身不存在固有的机械问题,在机上操作作业模式下能够稳定可靠运行;外围常规传感器配置完善,工作正常;设备控制基于 PLC 系统控制,各控制对象的控制逻辑是闭环的(如皮带速度反馈、斗轮转速反馈等);配备斗轮电机电流检测装置和有功功率检测装置,数据可通过模拟量或总线传递至 PLC 系统;大臂配备皮带秤,皮带秤数据可传输,支持工业总线传输;堆取料机与中控室的通信采用以太网光纤通信方式,机上交换机预留3D 激光扫描仪数据接口;同时还要配置位置、回转及俯仰角度定位系统保证堆取料机无人化作业安全,堆取料机上需安装激光及微波测距仪、俯仰传感器及 GPS 定位装置等。同时堆取料机一些辅助装置原来需要人工完成,机器实现无人化运行后,也要实现自动运行,如何实现,这就需要无人化辅助技术的研究。
2 辅助技术
2.1 斗轮机构圆弧档料板全自动调节装置
为适应无人化料场发展,圆弧档料板原有的结构越来越不适应无人化料场。由于斗轮堆取料机的斗轮机构是关键的取料机构,斗轮机构的取料通过取料斗子与圆弧档板的配合,把需要的散料转运到斗轮机构上部,再在上部卸料,由溜料板转运到皮带机上。在设计和装配时,要求取料斗子与圆弧档板一般留有 5.7mm 间隙,在圆弧档料板上与物料接触的地方,安装有耐磨衬板,耐磨衬板的厚度一般有 14-20mm ,耐磨衬板经过使用一段时间后,斗子与圆弧档板间隙会慢慢变大,最后大于 10mm 甚至大的达到 20-25mm ,当间隙大于 10mm 以后,取料时就会有物料从间隙泄漏出来,造成取料能力下降,浪费能源,同时会产生固体尘埃,对于整机的维护造成不利影响,也对环境造成一定的污染。为满足无人化料场的使用,斗轮机构增加一套全自动调节装置,通过短距离激光测距仪测量取料斗与圆弧挡料板距离,如距离变大超过允许范围,通过 PLC 控制器给动力油缸命令,以动力油缸为动力使圆弧挡料板自动绕回转铰轴做圆弧运动,动力油缸伸长,调整取料斗子与圆弧挡板距离,再通过微调油缸伸长缩短,微调取料斗与圆弧挡料板的距离,从而防止取料物料洒出,达到全自动调节取料斗与圆弧挡料板间距,从而实现斗轮机构无人化全自动取料目的(装置见图 1),辅助整机无人化取料稳定。
图 1
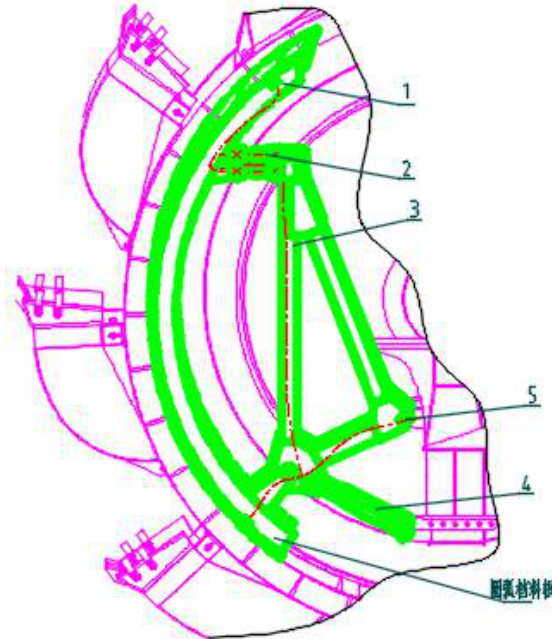
短距离激光测距仪 2、微调油缸 3、三角支架 4、动力油缸 5、回转铰点
2.2 臂架皮带机除了常规需配置拉线急停开关、跑偏检测开关速度检测器、溜槽堵塞检测器、料流检测开关,还必须配置如下开关,以保证控制系统应对下列现场检测控制装置的信号进行实时动态的采集及联锁,以保证系统安全可靠运行,实现无人经,主要内容如下:
(1) 非液压张紧装置终点位置极限检测开关
带式输送机重力张紧装置配备极限位置开关,开关常闭触点信号接入 PLC系统;信号触发时,控制系统应急停带式输送机,并发出报警。
(2) 液压张紧装置压力检测开关
带式输送机液压张紧装置配备压力开关,开关常闭触点信号接入PLC 系统;信号触发时,控制系统应急停带式输送机,并发出报警。
(3) 纵向撕裂开关
带式输送机配备纵向撕裂开关,开关常闭触点信号接入 PLC 系统;信号触发时,控制系统应急停带式输送机,并发出报警。
2.3 回转机构和走行机构的锚定装置
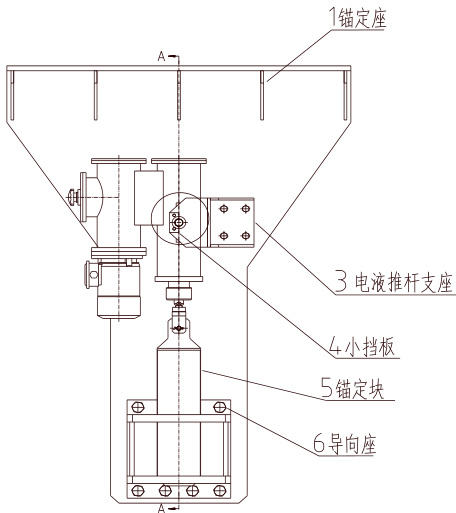
堆取料机采用 PLC 控制时,配有专门司机,当有大风来时或机器有段时间暂时不工作时,常常需要把臂架放在锚定桩上,走行机构把机器开到走行锚定位,然后回转机构回转到一定角度,走行和回转锚定销通过手动插入锚定座。但堆取料机采用无人化控制之后,则需要把这两个手动锚定装置改成自动锚定装置,通过在锚定销上增加油缸或电动推杆与液压推杆,当风带仪测到大风来时或接到指定,走行及回转运行到指定位置,通过 PLC 下达指令,回转和走行锚定销自动锚定上,以保证系统安全可靠运行。
图 2
2.4 整机设计时,需考虑机械结构的设计和空间需求:在机器顶部提供 3激光扫描仪的安装平台,平台周围设置走台栏杆,便于设备的安装、维护和保养并且保证有楼梯或走道到达并进入该平台,预留 3D 激光扫描仪支架和户外挡板的安装空间和接口。
3 结语
总之,堆取料机的无人化运行,除关键的三维扫描技术,其他辅助技术也很有必要,因为堆取料机任务一个小地方出故障或做不到自动工作,设备就不能自动运行,就称不上是无人化,故辅助技术的研究也必须同时进行,是无人化控制可靠性的必要保障,是保证无人化控制精确度和应用效果的必要辅助,也是设备稳定运行基石。
参 考 文 献
[1]王晓斌.基于模型自学习的智能斗轮堆取料机关键技术研究与应用[J].起重运输机械,2023,(23) :52-56.
[2]袁文胜.斗轮堆取料机无人值守技术研究及应用[J].今日制造与升级,2023,(07) :54-57.
[3]张茜.火电厂斗轮堆取料机智能化无人值守系统的设计与应用[D].江苏大学,2022.DOI:10.27170/d.cnki.gjsuu.2022.000461.
[4] 郑少亮. 煤场堆取料机无人值守系统的研究及应用 [J]. 煤矿机械,2021,42(11):164-166.DOI:10.13436/j.mkjx.202111052.
[5]赵德安,佘海波,李洋洋.堆取料机无人化系统在散货港口的应用[J].水运工 程,2021,(10):310-315.DOI:10.16233/j.cnki.issn1002-4972.20210924.008.
[6] 张 烁 . 斗 轮 取 料 机 无 人 化 取 料 控 制 技 术 研 究 [D]. 燕 山 大学,2020.DOI:10.27440/d.cnki.gysdu.2020.000998.
[7]赵庆斌,温丹.堆取料机无人化作业系统关键技术的研究[J].港口装卸,2015,(04):26-27.
[8]张瑞连,吴志坚.国内外堆取料机现状及智能化发展趋势分析[J].矿山机 械,2013,41(06):5-8.DOI:10.16816/j.cnki.ksjx.2013.06.002.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)