.jpg)
三维激光扫描仪在老城厢深基坑施工阶段对历保建筑的实时监测及数据分析

冷喆祥 李厚伟
上海建工七建集团有限公司 上海 200050
0 引言
老城厢区域往往承载着丰富的历史文化价值,其中的历史保护建筑是城市发展历程的重要见证。然而,随着城市现代化进程的加速,在老城厢进行深基坑施工的项目日益增多。深基坑施工过程中产生的土体变形、振动等因素,可能对周边历保建筑的结构安全产生潜在威胁。本文研究对象开明里的南侧211J-01、211J-012 地块分东区和西区两个基坑,基坑边距离开明里建筑最近距离约22.6 米,基坑开挖深度10.7 米。
传统的监测方法在面对复杂的老城厢环境和对历保建筑高精度监测要求时,存在一定的局限性。三维激光扫描技术作为一种先进的非接触式测量技术,能够快速、全面地获取物体表面的三维信息,为老城厢深基坑施工阶段对历保建筑的实时监测提供了新的解决方案。通过对历保建筑进行实时、精准的监测,并对监测数据进行科学分析,可以及时掌握建筑的变形情况,为采取有效的保护措施提供依据,确保历保建筑在深基坑施工影响下的安全。
1 工程概况
开明里建于 1928 年,作为老城厢内目前为数不多的保存比较完整的后期石库门里弄建筑群,且建造至今主要均主要作为本地人的居住场所而长期存在,作为近代“海派”建筑的重要组成部分,不仅见证了近现代社会的发展和变迁,同时也作为传承老城厢文化的重要载体。它位于老城厢旧称九亩地的大境路97 弄,南临大境路,西靠露香园路,北侧为东青莲街,东侧为旧仓街,地块内共有13 栋砖木结构住宅。其中大境路、露香园路、青莲街均为历史风貌保护街巷。
图1 开明里整体空三模型

2 监测方案设计
本次研究的目的是开明里在整个露香园二期施工过程中,将经历周边深基坑开挖;建筑本体顶升、卸解、平移、回迁等工序,同时最终在回迁后需要与新建地下室进行新老结构的连接,因此在整个施工过程中,结构本地的形变是需要进行全程监测,以确保最终新增地下室与原地上结构连接的定位精准度高。经过多轮方案比选,决定重新采用无人机+三维激光扫描仪对开明里建筑群进行空-地一体式的三维模型扫描,以获取精准的建筑本体尺寸信息。
图2 开明里现场现状

2.1 监测区域与目标确定
首先对施工现场周边一定范围内的历保建筑进行详细排查和评估,确定需要重点监测的建筑对象。根据历保建筑与深基坑的相对位置、建筑的结构特点和历史价值等因素,划分不同的监测区域。对于距离基坑较近、结构较为脆弱或具有重要历史意义的建筑,设置为一级监测区域,进行高密度、高频次的监测;对于相对距离较远、结构稳定性较好的建筑,划分为二级监测区域,适当降低监测密度和频次。明确每个监测区域内的具体监测目标,如建筑的墙体、墙角、门窗洞口等关键部位,以及建筑整体的倾斜、沉降等变形情况。
2.2 扫描站点与标靶布置
为了全面、准确地获取历保建筑的三维信息,合理布置三维激光扫描仪的扫描站点至关重要。在老城厢复杂的环境中,考虑到建筑的遮挡、交通状况等因素,选择视野开阔、能够清晰观测到监测目标的位置作为扫描站点。在每个扫描站点,设置稳定的三脚架或专用测量平台,确保扫描仪在扫描过程中的稳定性。同时,为了实现不同扫描站点数据的拼接和统一坐标转换,在监测区域内均匀布置一定数量的标靶。标靶采用具有高反射率的材料制作,形状为圆形或方形,其中心具有明显的标识点。标靶的布置位置应选择在历保建筑表面相对平坦、不易被遮挡且具有代表性的部位,如建筑的墙角、墙面上的平整区域等。相邻标靶之间的距离根据扫描精度要求和建筑的大小进行合理设置,一般在数米至数十米之间,以保证在不同扫描站点下都能至少观测到部分公共标靶,从而实现点云数据的准确拼接和坐标统一。
2.3 扫描参数设置
根据监测目标的特点和精度要求,合理设置三维激光扫描仪的扫描参数。扫描分辨率决定了点云数据的密度,对于历保建筑的关键部位,如墙体表面的裂缝、装饰构件等,采用较高的扫描分辨率,以获取更详细的表面信息;对于建筑整体结构的监测,适当降低扫描分辨率,以提高扫描效率和减少数据处理量。扫描距离根据扫描站点与监测目标的实际距离进行调整,一般控制在扫描仪的有效测量范围内,同时考虑到距离对扫描精度的影响,尽量保持扫描距离适中,避免因距离过远导致精度下降。扫描角度范围应覆盖整个监测区域,确保建筑的各个部位都能被扫描到。此外,还设置合适的扫描时间间隔,根据深基坑施工的进度和历保建筑可能产生变形的速率,确定每天、每周或每两周进行一次扫描,以实现对建筑变形的实时监测。
3 数据采集与处理
在深基坑施工前,使用三维激光扫描仪对历保建筑进行初始状态扫描,获取建筑的原始三维数据,作为后续变形分析的基准数据。在施工过程中,按照预定的扫描时间间隔和扫描方案,定期对历保建筑进行扫描。
从不同扫描站点获取的点云数据处于各自独立的局部坐标系中,需要进行拼接处理,将其统一到同一个全局坐标系下。利用扫描仪配套的数据处理软件,通过识别不同点云数据中的公共标靶,采用基于标靶的拼接算法,将各个局部点云数据进行精确拼接。拼接完成后,对整体点云数据进行去噪处理。由于扫描过程中可能受到环境噪声、反射干扰等因素的影响,点云数据中会存在一些噪声点,这些噪声点会影响后续的数据分析和模型构建。本次研究采用了基于高斯模型的自适应统计滤波算法来进行去噪和配准。根据自适应统计滤波原理,计算每个点邻域点集的均值和标准差。对于每个点,判断其在各个维度上与均值的差值是否超过设定的阈值 k 倍标准差。若超过,则将该点标记为噪声点,并从点云数据中剔除;若未超过,则保留该点。重复此过程,直到遍历完所有点,完成点云去噪操作。
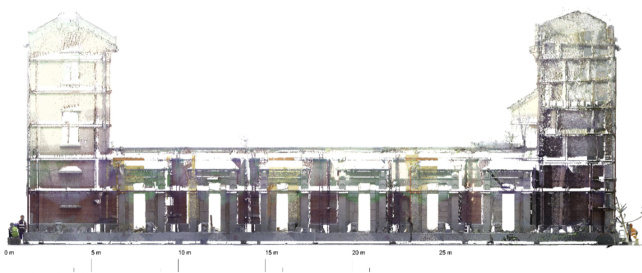
图3 快速去噪后的点云模型外立面截图
4 监测数据分析
将施工过程中不同时间段获取的风貌历保建筑三维模型与初始基准模型进行对比分析,计算建筑各部位的变形量。通过软件的分析工具,选取建筑的关键部位,如墙角、墙体的特定位置等,测量这些部位在不同时期模型中的坐标变化,根据坐标差值计算出位移量、沉降量和倾斜量等变形参数。对于墙体的变形,分析墙体表面不同位置的位移分布情况,判断墙体是否存在整体倾斜或局部变形。通过对变形量随时间的变化曲线绘制,观察变形的发展趋势。如果变形量在一段时间内呈现持续增长且超过预警值,表明建筑可能受到深基坑施工的较大影响,需要及时采取相应的保护措施;如果变形量在一定范围内波动且增长趋势不明显,说明建筑在当前施工阶段相对稳定。
为了验证三维激光扫描技术监测数据的准确性,将其与传统监测方法获取的数据进行对比分析。在历保建筑上同时布置传统的监测仪器,如水准仪用于沉降监测、经纬仪用于倾斜监测等。在相同的监测时间段内,将三维激光扫描技术得到的沉降量、倾斜量等数据与传统监测仪器测量的数据进行对比。通过对比发现,两种监测方法得到的数据在趋势上基本一致,且在误差允许范围内具有较好的吻合度。这表明三维激光扫描技术在老城厢深基坑施工对历保建筑的监测中具有较高的可靠性,能够准确反映建筑的变形情况,同时该技术相比传统监测方法具有更全面、高效的优势,能够获取建筑整体的三维变形信息,为历保建筑的保护提供更有力的数据支持。
5 结论与展望
本文通过对三维激光扫描仪在老城厢深基坑施工阶段对历保建筑实时监测及数据分析的研究,表明该技术在历保建筑保护领域具有显著的应用价值。三维激光扫描技术能够快速、准确地获取历保建筑在深基坑施工影响下的三维变形信息,通过对监测数据的深入分析,为建筑的安全评估提供了可靠依据。与传统监测方法相比,该技术具有非接触、高效率、全面性等优点,能够克服老城厢复杂环境和历保建筑特殊保护要求带来的监测困难。
参考文献:
[1] 王建国。城市历史环境的保护与更新 [M]. 南京:东南大学出版社,2020.
[2] 张祖勋,杨生春。三维激光扫描技术及其工程应用 [J]. 测绘通报,2018 (5):1-5.
[3] GB 50007-2011,建筑地基基础设计规范 [S].
[4] 李海峰。深基坑施工对邻近历史建筑影响的监测与分析 [J]. 施工技术,2021,50 (12):2.
基金项目:市“科技创新行动计划”社会发展科技攻关项目(21DZ1203200)
作者简介:冷喆祥(1984-),男,本科,高级工程师
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)