.jpg)
跨座式单轨交通接触轨巡检装置的智能巡检实现

冀雄涛 魏继江 田鑫
中铁电气化局集团有限公司智慧交通技术分公司 100080
Abstract: This paper presents an intelligent inspection system for the contact rail of straddle-type monorail transit, implemented through an image recognition algorithm deployed on the inspection device. By training a custom dataset and locally deployin g the algorithm on the contact rail inspection device , hardware acceleration is employed to optimize model performance, improving inference speed and enabling real-time detection of inspection targets. Based on the recognition results, the contact rail inspec tion device achieves high-precision intelligent positioning, ultimately realizing intelligent inspection with centimeter-level positioning accuracy and millimeter-level distance measurement precision. Keywords: straddle-type monorail; contact rail; inspection device; intelligent inspection; image recognition
0 引言
跨座式单轨交通由于其成本低、周期短、节能环保、适应地形能力强、占地面积小等特点[1],在国内逐渐发展起来。接触轨作为跨座式单轨交通中列车电能提供者,其可靠性和安全性直接影响列车运行效率和乘客安全。接触轨传统人工巡检方式主要存在效率低、盲区多、存在安全隐患等特点[1],巡检方式自动化、智能化已成为发展趋势。近年来,接触轨巡检多采用机械自动化装置代替人工 [2][3],因此,本文提出一种集成机械结构设计、嵌入式控制、图像识别及交互式 GUI 程序的智能巡检装置,实现接触轨全自动高精度智能巡检。
1 巡检装置系统组成
1.1 机械结构设计
巡检装置机械结构采用分体式设计,分为驱动本体和巡检本体两部分。驱动本体由驱动架、伺服电机、轮组等组成,用于驱动巡检装置;巡检本体由激光测距传感器、摄像机、机架等组成,主要完成巡检工作,包括距离测量、图像识别、运动控制等。巡检装置机械结构如图 1 所示。其中激光测距传感器采用高精度点激光,测量范围 20mm 至 1m,测量精度1um。
采用F1 分数表示,结果表明,大、中型待检目标识别效果良好,但对螺栓等小目标而言识别率有所降低,基本满足使用要求。

1.2 嵌入式控制
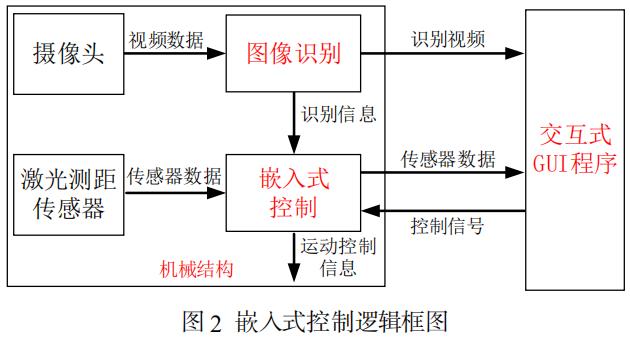
嵌入式控制采用基于 Cortex-A9 内核的 i.MX6Quad 处理器,定制Linux 系统。通过编写业务逻辑代码,实现激光测距传感器数据收发、伺服电机控制、图像识别信息处理、交互式 GUI 程序通信等。嵌入式控制功能逻辑框图如图 2 所示。
1.3 图像识别
图象识别采用实时目标检测深度学习算法 YOLOv5(You Only Look Once)[4],推理平台为 Jetson Xavier NX 计算模组。图象识别主要完成巡检目标实时识别,识别信息发送、识别视频传输。通过图像识别实现巡检装置在巡检目标位置高精度定位,从而实现智能巡检。
1.4 交互式 GUI 程序
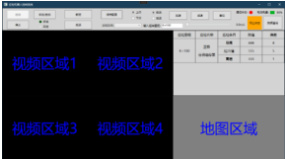
交互式 GUI(Graphic user interface)程序运行环境为搭载 Windows 系统、Intel 处理器的工业平板电脑,由 C#语言基于.NET Framework 框架编写。可与图像识别模块、嵌入式运动控制模块通信,接收视频、传感器信息,发送控制信息,并对视频信息、传感器信息等显示。程序界面如图 3 所示。
2 图像识别算法

YOLO 算法是一种单阶段目标检测算法。它将目标检测问题转换成回归问题,把图片划成网格,由网格预测检测目标。其核心原理是通过单次前向传播同时预测图像中所有目标的位置和类别。算法主要分为四个部分:输入端、Backbone、Neck 和Prediction。其中,输入端表示输入图片;Backbone 为主干网络,主要负责提取输入图片的多尺度特征。Neck 则完成不同尺度特征的融合,提升多尺度目标检测能力;Prediction 通过分类分支和回归分支对融合后的特征进行分类和定位。与 YOLOv4 相比,YOLOv5 算法主要改进如下:(1)输入端:在模型训练阶段增加 Mosaic 数据增强。随机缩放、随机裁剪、随机排布等方式可有效提高小目标检测效果;自适应锚框计算。每次训练时自适应计算不同训练集最佳锚框值;自适应图片缩放。对原始图像自适应添加最少的黑边,提升推理速度。(2)Backbone:融合Focus 结构[5]与CSP 结构。Backbone 网络通常是一些性能优异的分类器网络,用来提取通用特征。YOLOv5 使用CSPDarknet53 结构、Focus 结构作为 Backbone 网络,减少了算法的计算量、加快了计算速度。(3)Neck 网络[5]:使用FPN+PAN 结构。Neck 网络通常位于基准网络和头网络中间位置,使用它进一步提升特征多样性及鲁棒性。(4)Prediction 网络:使用损失函数GIOU_Loss[6]、预测框筛选DIOU_nms[7]。Head 网络完成目标检测结果输出。该网络通常包含一个分类分支和一个回归分支。YOLOv5 利用GIOU_Loss 代替SmoothL1 Loss 函数,进一步提升算法检测精度。
图 4 展示了 YOLOv5 自动检测算法网络结构图。
YOLOv5 算法目前包含4 个常用网络模型:s、l、m、x。YOLOv5s 网络深度和特征图宽度最小,参数少,推理速度快,适用于工业检测;其他模型网络深度和特征图宽度都较大,虽然检测精度有所提升,但实时性不够,所以选择 YOLOv5s 作为本文使用的网络模型。
3 接触轨巡检装置的智能巡检实现
3.2 模型量化与部署
由于接触轨巡检装置体积和重量受限,若将图像识别算法直接部署在计算模组上,推理无法满足实时性要求,需提高模型推理速度。
3.1 数据集制作与模型训练
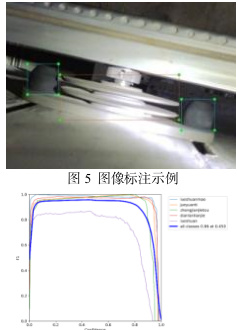
本文使用数据集采自安徽芜湖地铁沿线,数据集共 3740 张图片,分为螺栓、螺栓帽、中间接头、电缆连接、绝缘支撑5 类,数据集使用 labelImg 标注,标注格式为 YOLO 格式。采用随机方式划分为训练集、测试集。训练模型时使用 Mosaic数据增强,对训练集进行翻转、色调变换等。训练环境 CPU:i7-13700F/GPU:4060TI-8GB/pytorch1.13/CUDA11.6。训练结果TensorRT[8]是 NVIDIA 开发的推理优化器。它基于 NVIDIA® CUDA® 并行编程模型构建,采用量化、层和张量融合以及内核调优等技术,将神经网络模型部署到超大规模数据中心、工作站、笔记本电脑和边缘设备,提高神经网络模型推理速度,满足实时服务以及自主和嵌入式应用程序需求。TensorRT 支持混合精度计算,使用 FP16、 INT8 等低精度方式可显著减少计算量和存储空间,大幅提高模型推理速度。本文使用 FP16 方式推理,在基本不影响精度的前提下显著提高推理速度,获得推理速度与精度的平衡。
DeepStream[9]是NVIDIA 推出的智能视频分析解决方案,专为多传感器视频/图像处理设计。它基于 GStreamer 多媒体框架,结合TensorRT、CUDA[10]等技术,提供端到端的管道(如解码、推理、跟踪、编码),支持实时分析多路视频流。广泛应用于安防监控、自动驾驶、智慧城市等领域。TensorRT 是 DeepStream 的核心依赖之一,TensorRT 对训练好的模型进行优化,生成的高效引擎被 DeepStream 直接调用,实现低延迟推理。
3.3 智能巡检实现
接触轨巡检装置智能巡检功能如下:平板电脑远程发送自动巡检指令后,巡检装置以设定速度运行,自动停止在待检目标上方,待传感器测量完成后继续运行,直至完成整条铁路沿线的巡检工作。为了实现智能巡检功能,需要巡检装置精确停留在待检目标上方。解决方案如下:在装配上采用摄像头与激光测距传感器紧凑安装;待检目标经算法识别后获取图像位置信息,设置图像平行于x 轴方向,且位于y 轴中点附近的小区域为标定区域,当待检目标位于标定区域内时视为巡检装置位于待检目标正上方。通过反复测试,寻得最佳参数。
4 巡检装置智能巡检测试
接触轨巡检装置按照上文思路研制,并进行了实验测试。测试内容为巡检装置放置在测试平台上,在巡检装置前方放置待检目标,控制巡检装置运动,测量:①巡检装置在识别待检目标后停止位置与待检目标的位置关系;②待检目标与激光测距传感器的距离信息。共进行 50 次实验,实验测试结果如图所示:
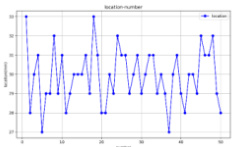
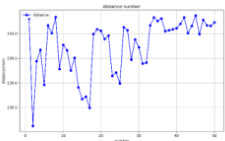
实验结果表明,巡检装置停在待检目标上方的位置关系为 27mm 至 32mm,平均值为 29.9mm ;激光测距传感器测得的与待检目标的距离关系为 138.12mm 至 140.37mm ,平均值为 139.76mm,与标准值 140mm 差值最大为 1.88mm,最小为 0.37mm。具有较好的智能巡检效果。因此,以深度学习图象识别算法为基础的接触轨巡检装置智能巡检,可实现精度为厘米级的位置控制和精度为毫米级的距离测量。
5 结语
本文针对跨座式单轨交通接触轨巡检存在的问题,研发的巡检装置可基本实现无人化智能巡检,基于图象识别算法的智能控制和距离测量精度较高,具有较大的现实价值;同时智能控制功能也为更高阶的图像判损等功能提供了基础。该智能控制功能不仅可用于接触轨巡检装置,还可用于其他智能轨道交通设备。
参考文献:
[1]刘俊,武农,孙晓彤.跨座式单轨交通发展浅析[J].铁道勘察,2021,47(05):25-29.DOI:10.19630/j.cnki.tdkc.202107130002
[2]中铁工程设计咨询集团有限公司.跨座式单轨轨道梁巡检装置:202211186622.9[P].2022-12-02.
[3]杭州中车数字科技有限公司,杭州中车车辆有限公司.接触轨检测系统、巡检工程车及检测方法:202010053610.3[P].2020-05-08.
[4]JOCHER G, STOKEN A, BOROVEC J, et al.Ultralytics/YOLOv5:V3.1-bug fixes and performance improvements[EB OL].https://doi.org/10.5281/zenodo.4154370, 2020. doi:10.5281/zenodo.4154370,2020.
[6]邹承明,薛榕刚.融合 GIoU 和 Focal loss 的 YOLOv3 目标检测算法[J].计算机工程与应用,2020,56(24):214-222.
[7]白丁元.基于边缘计算的铁路入侵目标识别方法研究[D].北京交通大学,2022.DOI:10.26944/d.cnki.gbfju.2022.001012.
[8]顾德英,罗聿伦,李文超.基于改进YOLOv5 算法的复杂场景交通目标检测[J].东北大学学报(自然科学版),2022,43(08):101079.
[9]胡晨龙,裴少通,刘云鹏,等.基于 LEE-YOLOv7 的输电线路边缘端实时缺陷检测方法[J].高电压技术,2024,50(11):5047-5057.DOI:10.13336/j.1003-6520.hve.20230945.
[10]白洪涛.基于GPU 的高性能并行算法研究[D].吉林大学,2010.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)