.jpg)
安全防护者

冉晓莹 董佑筵 彭昭鸿 张子航
天津职业技术师范大学 自动化与电气工程学院 天津
1 引 言
在我国积极应对人口老龄化挑战 力提 量的战略 构建完善的养老服务体系已成为保障民生福祉的关键举措。 对人口老龄化中长期规划》、《关于进一步促进养老服务消费 国务院关于深化养老服务改革发展的意见》等重要政策文 ,核心在于健全以居家为基础、社区为依托、机构为补充、医养 照护服务,积极发展智慧养老新业态,并着力拓宽养老服务渠道, 全 行动指南和政策框架。
在这样的背景条件下,设计一款养老机器人是非常必要的,既符合国家的发展要求,又解决“谁来养老,如何养老”这一问题,养老机器人的出现,不只是解决年轻人的养老负担,又体现了科技服务于人民这一观念,还能提高人民的生活质量。养老机器人能让老年人在熟悉的环境中获得更精准、更及时的支持,既保留生活的自主性,又能感受到持续的关怀。从满足基本的生活照料需求,到兼顾情感陪伴与健康管理,养老机器人正在重新定义科技与养老的关系,为老龄化社会注入温暖而高效的科技温度。
养老机器人不仅可以服务于个人,还可以服务于医院,养老院,这样解决了这些场所人力不足的问题,又帮助了护理人员,减轻他们的工作强度。随着老龄群体的日益增加,难以满足老人们多样化的养老需求,在这种背景下,养老机器人应运而生,成为了解决养老困境的新希望。
2 系统设计与实现
2.1 独居老人多维监护机器人的控制系统
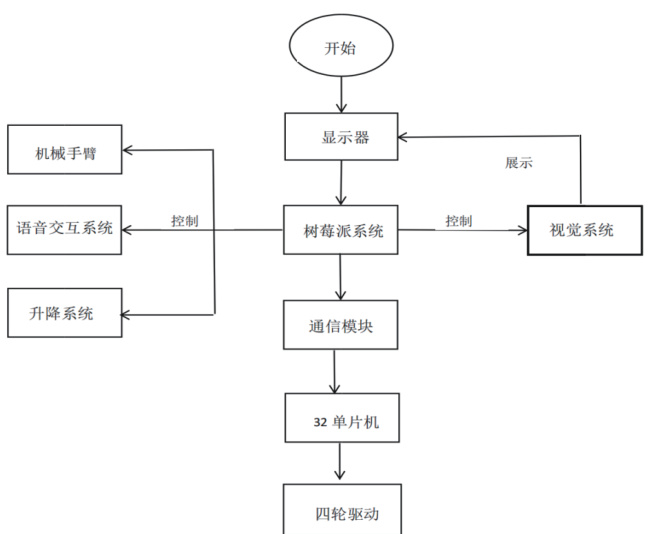
控制系统分为底盘控制与总体控制两大部分,基本构件为主板树莓派 CM4 和副板 STM32F103 两个单片机,两者分工明确又协同配合,确保机器人各项功能有序运行,不会出现混乱情况。
底座采用铝合金材料制作,这种材料既轻便又坚固,能很好地支撑机器人的整体结构。底座搭配 4 个轮子,可实现全方位无限制行走,自身重量不大,方便机器人移动,同时能很好地支撑机器人的整体结构,承受各部件的重量。无论是向前向后,还是左右转向,都能灵活完成,方便机器人在居家环境中灵活移动,适应不同房间的布局。这部分的运动控制由 32 单片机负责,它能精准调控轮子的转速和转向,让机器人根据需求自由穿梭在房间各个角落,顺利到达老人身边或指定位置。
机械手臂以及显示屏的控制连接则采用树莓派单片机。树莓派性能较强,处理数据的速度更快,能处理更复杂的指令,满足机械手臂精细操作和显示屏信息显示的需求,让机械臂做出精准的动作,让显示屏清晰展示各类信息。主板与副板之间主要通过 TCP 协议进行通信连接,这种连接方式稳定可靠,传输数据时不容易出现丢失或错误,能保证数据高效传输。树莓派 CM4 在控制机械手臂、显示屏等其他模块的同时,也能对STM32F103 进行控制,实现了整个系统的统一调度和协同工作,让机器人成为一个有机的整体。
2.2 独居老人多维监护机器人的运动系统
由底盘驱动硬件系统和机械手臂作为主要构件,两者相互配合,分别负责机器人的移动和操作功能,共同满足居家场景中的多种需求。
阿克曼铝合金底盘在保证结构强度的同时兼顾了轻量化特点,日常使用中不易损坏,也方便移动。搭配高扭矩电机以及四驱麦轮,能够提供充足的动力支持,让机器人在不同地面都能顺利移动。这套底盘创新性地结合了运动学上的麦克纳姆轮和阿克曼结构优势,再加上 PID 算法的精准调节,能有效保持小车行驶时的平衡状态,即使在不平整的地面也能稳定移动,不会轻易晃动或倾倒。整个底盘的移动、转向等动作都通过 STM32单片机实现全方位控制,响应及时且操作精准,能按照指令准确到达指定位置。
机械手采用 3D 打印技术制作而 材质轻便且适合居家环境使用,不会占用太多空间,也不会对家具造成磕碰。它由 6 个舵机作为动 展模块板连接,实现对各个关节的灵活控制,能做出多种不同的动 作记录与复现,方便根据实际需求调整操作。在现实应用场景 等;借助传感手套记录的动作数据,再加上仿人体肘关节设计的 作既具备拧瓶盖等精细动作的精度,又能拥有推动较轻障碍物所需的力量,充分满足居家使用的各种需求
2.3 独居老人多维监护机器人的显示与识别系统
主要搭配一块可良好连接树莓派的 触摸式 莓派专用的可触摸式屏幕,大小为7 寸,这种屏幕不仅适配性强,还能 以清晰显示树莓派内置系统的桌面,包括实时天气、日程安排等 模样,实现视频通话功能。依托树莓派的联网功能,下载合适 清晰显示出子女的影像,摄像头同步传输老人的画面,再加 让老 人和子女仿佛面对面交流,有效增强了他们之间的情感联系,很大程度上缓解了老人的孤独感
配备 4K 摄像头和计算机视觉算法,这套组合让机器人具备了强大的识别能力。它能精准识别老人摔倒的姿势,一旦发现异常能迅速做出响应;还能实时检测行走路线上的障碍物,例如地面散落的杂物;同时,窗户开关状态、煤气阀门是否关闭以及室内烟雾情况,都能被准确识别。此外,系统还具备智能跟踪老人的能力,特别是当老人进行弯腰、转身等大幅度动作,或者进入容易发生危险的区域时,机器人能灵活调整位置,时刻跟随在老人的身旁,持续保障老人的安全。
2.4 独居老人多维监护机器人的语音交互系统
小功能语音板采用ASR PRO2.0 4M 板子,这款板子性能稳定,支持 10 米范围内的远距离唤醒,即使老人轻声呼唤也能被准确识别,语音识别率能达到 78% 以上,减少了误唤醒或识别错误的情况。它自带外放音响和语音交互模块,外放音响音质清晰,音量可调节,既能实现与老人自然的语音互动,回应老人的提问或指令,也能进行声音外放,播放新闻、戏曲等内容,满足日常使用中的音频需求。
采用 4k 摄像头连接树莓派,结合人工智能相关的计算机视觉算法,让系统具备了可靠的计算机视觉技术能力。它能够敏锐探测到阻碍行走的物品,如散落的物品等,进行实时检测并及时提醒老人注意;同时支持视频通话功能,方便老人与子女远程沟通,也能精准识别老人摔倒姿势,在紧急情况时发挥作用,是远程联系子女的主要功能构件。屏幕会清晰显示天气信息并直观提醒老人增减衣物,还能通过语音播报来强化提醒效果,这种视听结合的方式更贴合老人的使用习惯,让老人更容易接受和记住相关信息。
使用前,可以录入老人子女的音色进行语音合成,机器人用子女的声音与老人交流,这样能让老人在与机器人交互时感受到熟悉的亲切感,减少对机器的疏离感。系统具备语音唤醒功能,唤醒词可以根据老人的习惯自行设置,使用者通过语音呼唤就能轻松唤醒开机,无需复杂操作。它还支持设置吃药、闹钟等日常提醒,到时间后会主动发出语音提示;当检测到烟雾等危险情况时,会立即触发响亮的警报,同时同步通知子女或邻居,必要时还能主动呼叫救护车并播放预设的呼救语音,全方位应对可能出现的紧急情况,为老人的安全保驾护航。
2.5 独居老人多维监护机器人的供电与升降系统
采用大功率锂聚合物电池和相关的充电器,电池能稳定供应机器人各个模块的电力需求,让机器人可以长时间持续工作。配套的充电器设计实用,能快速为电池补充电量,确保机器人随时保持充足动力,保障监护功能不中断。同时配备升降仪和控制器,通过预先设置好的操控程序,机器人可以自主控制身体的升降。
升降仪的高度调节范围在 100-150cm ,承重能力达到 30kg,这样的参数完全能满足家庭环境中高处清洁、取放物品等日常需求。升降动作由机械臂来控制,机械臂会精准按压控制器上的按钮,实现升降的启动和停止。这种机械臂与升降系统的联动设计,让机器人的操作范围得到有效扩大,无论是低处的物品整理还是高处的物品拿取都能轻松完成,在居家场景中能发挥更大作用,进一步提升了整体的实用性。
上述系统各模块并非独立运行,而是通过树莓派与 32 单片机的协同控制形成有机整体:树莓派作为主控中枢,统筹视觉识别、语音交互、显示终端等模块的数据处理与指令分发;32 单片机则聚焦底层执行,驱动底盘移动与升降系统运作,两者通过 TCP/IP 协议实现毫秒级数据交互。各模块功能互补、信号互通,共同构成完整的监护闭环。
图1 研究技术路线图
3 家居监护流程
系统要达成的目标是“识别老人摔倒姿势,进行语音警报通知以及显示”。为达成这一目标,独居老人多维监护机器人需要完成以下基本模块:
建立专门的图像库以及计算机视觉算法,能够准确识别到老人摔倒的姿势,并且在实际使用中不断优化算法来提升识别的精确度;同时配备的显示屏以及摄像头可以进行实时视频显示,让老人和远程的家人都能清晰看到现场情况。
设计完整的报警流程,一旦检测到老人摔倒,系统会立刻通过树莓派 CM4 系统内的联网功能,在预先设计的系统界面上通知老人和亲人,同时自动联系设置好的社区管理人,确保多方能及时知晓情况并采取措施。基于以上,本研究设计独居老人多维监护机器人的警报流程:
图像库建立:收集数量足够多的老人摔倒的姿势图,涵盖不同角度、不同姿态的场景,进行全面的图像采集,后续的识别算法提供充足的数据支撑。
计算机视觉算法:设计专门的相关算法,通过对图像库中数据的学习和训练,运用图像识别技术能够成功且快速地识别到老人摔倒的姿势,减少误判和漏判的情况。
移动跟随:STM32F103 进行控制底盘,使机器人可以进行360 度多方位旋转;灵活调整方向;摄像头会持续检测并锁定事先设定好的老人,实现自动跟随,确保在老人移动过程中也能保持监护。
树莓派 CM4 联网功能实现:在树莓派 CM4 上进行简洁直观的界面设计,保证联网功能稳定可靠,同时预设独居老人的亲人以及其他社区成员等的联系方式,方便在紧急情况下快速发起联系。
视频显示与语音警报:搭配4K 摄像头以及相关算法,摄像头收集到的实时视频能够传送到树莓派内部,通过网络实现云观看;让远程的家人能随时了解现场;同时语音系统会立刻发出明显的警报响声,提醒老人周围可能存在的人提供帮助。
整体连接检测:在设计完成各个模块的后,将它们相互连接,全面检测树莓派 CM4 是否能够对各个模块进行有效的相关控制,确保整个系统在实际使用中能够协调运转,避免出现功能脱节的问题。
4. 结 论
项目针对我国老龄化加剧、独居老人占比超 30% 的现状,聚焦其面临的摔倒、煤气忘关、高处物品掉落等安全隐患和情感孤独问题, 能养老领域发展及相关政策支持,团队计划研发一款适用于家居场所 追踪、智能升降、语音交互与屏幕显示、联网视频通话、灵活机械臂 随老人、清理高低处障碍、联系子女等,实现当老人摔倒的时候 老人需求,专注于独居老人安全守护, 使老人孤独感指数下降,提升居家 全系数, 助力构建科技适老型居家养老体系。
参考文献:
[1] 刘 友 婷 . 养 老 机 器 人 来 了, 能 给 养 老 服 务 带 来 什 么? [N]. 工 人 日 报 ,2025-06-16(006).DOI:10.28277/n.cnki.ngrrb.2025.004242.
[2] 刘映群 , 黄嘉源 , 李泳智 , 等 . 基于人工智能的居家老人监护系统的设计与实现 [J]. 传感器世界 ,2024,30(01):35-40.DOI:10.16204/j.sw.issn.1006-883X.2024.01.007.
[3] 卢 嫚 , 陈 佳 悦 . 基 于 树 莓 派 的 智 能 语 音 交 互 系 统 设 计 [J]. 科 技 与 创 新 ,2023,(18):47-49.DOI:10.15913/j.cnki.kjycx.2023.18.014.
[4] 陈腾 , 荣学文 , 李贻斌 . 基于语音交互的四足机器人多模式控制实验设计 [J]. 实验室研究与探索 ,2024,43(10):65-69+106.DOI:10.19927/j.cnki.syyt.2024.10.014.
[5] 周 艺 萌 , 董 玄 , 黄 悦 . 老 人 防 跌 倒 智 能 检 测 系 统 设 计 [J]. 电 子 制 作 ,2024,32(20):50-53+58.DOI:10.16589/j.cnki.cn11-3571/tn.2024.20.016.
基金项目:国家级大学生创新创业训练计划项目“安全防护者——AI 赋能的独居老人多维监护机器人”(项目号:202510066040)
.jpg)
.jpg)
.jpg)
.jpg)