.jpg)
辅助喂药机器人的设计与研究

王守昊 屠志文 张家铭 方文昊 王剑锋 朱希玲
上海工程技术大学 机械与汽车工程学院 上海 201600
引言
我们国家正处在人口大周期的关键时期,老龄少子化加速到来,已经成为最大的“灰犀牛”之一。其中,老龄化是经济社会进步下人口再生产方式转变的结果,由低生育率和寿命延长共同作用,已成为全球普遍现象,中国不可避免。截至 2022 年末,全国 60 周岁及以上老年人口 28004 万人,占总人口的 19.8% ;全国 65 周岁及以上老年人口 20978 万人,占总人口的 14. 9% 。全国 65 周岁及以上老年人口抚养比 21.8%[1] 。

图 1 2012 年—2022 年全国60 周岁及以上老年人口数量及占全国人口比重
随着科技的发展,针对养老的机器人层出不穷。机器人深入各个领域,成为养老看护中非常重要的一环。相较传统人员照顾的方式而言,机器人能做到准时、及时和准确的满足老人的需求,同时也可以减轻人员压力减少人员成本[2]
因此,我们针对发现的问题,本作品设计了一台辅助喂药机器人来进行解决,辅助喂药机器人的设计与研发的设计是针对老年人生活的场景。
1. 理论研究及设计思路
1.1 机器人设计
图 1 辅助喂药机器人模型
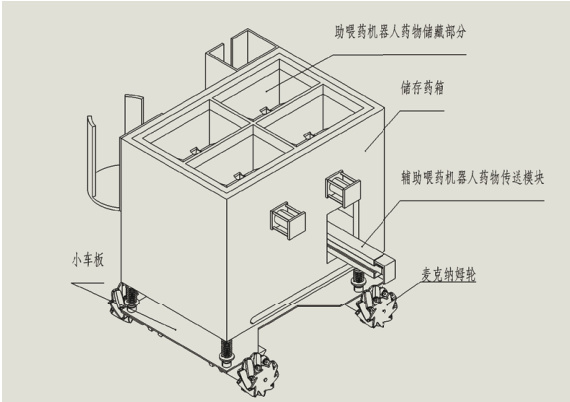
机器人设计包括机械结构、运动控制等方面。其中机械结构设计直接决定了机器人的物理性能和工作范围,设计中,需综合考虑机器人的承重能力、运动灵活性、稳定性等因素。而运动控制是实现机器人自主导航和精确执行操作的技术环节,需采用先进的控制算法和传感器技术,确保机器人准确感知周围环境并反应,满足药物输送和定时提醒的需要。
1.2 药物运输
本研究设计的辅助喂药机器人创新性地采用全向移动的麦克纳姆轮作为基础行走机构,该轮组通过四个斜置辊子的协同差速控制,可实现毫米级精度的平移、旋转及任意角度组合运动,显著提升了机器人在狭窄通道与密集货架环境中的 maneuverability(可操作性)。
1.3 药物储藏
药物储藏功能通过集成智能货舱与环境自适应系统,实现对药品储存环境的精准控制与安全管理。同时,储藏系统通过物联网传感器网络与云端数据平台实时互联,可动态记录药品的存储时长、环境参数波动及存取操作日志,支持远程阈值报警(如温湿度异常、舱门未关)与历史数据追溯。该功能模块不仅满足《药品经营质量管理规范》(GSP)[3] 对药品储存的合规性要求,更通过与机器人运动控制系统的协同设计,确保运输过程中储藏单元的姿态稳定性,为药品从分拣到配送的全流程质量安全提供硬件与数据层面的双重保障。
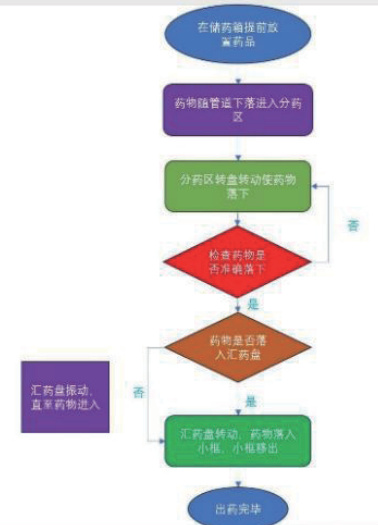
图 2 小车工作流程图
2 结构和硬件
2.1 结构
2.1.1 底盘结构
图 3 辅助喂药机器人底盘机构
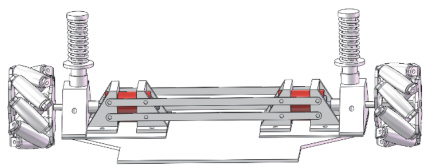
为了满足辅助喂药机器人在家中狭小的范围内能够快速准确的变向,我们的底盘选择使用麦克纳姆轮。
2.1.2 分药机构
辅助喂药机器人药物储藏部分效果如图4。
图 4 助喂药机器人药物储藏部分
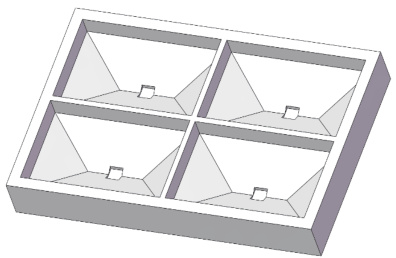
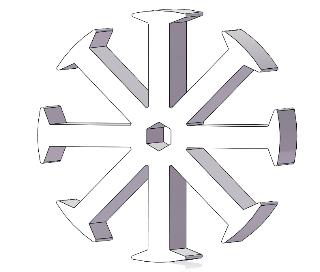
药物被放置后会往中间预留的孔位汇入,在孔位的下方我们提前安置了一块可绕轴旋转的挡板,在药物下落的过程中对药物下落的数量提前进控制,容错最多为两粒。我们查询了国内现在对空心胶囊和药片的尺寸规格的规定,采用中间值直径约在 13.4mm 到 13.8mm ,口服外径在 5.48mm 到 5.66mm[4] 。为保障其更加精确的使药物与药物间分开,在其一边设计了一个分药的机械结构,其拥有 8 片分块来保障上方下落的药片可以做到一片一片落下。设计模型如图 5所示。
每块分药区由独立电机控制,每次转动的角度大小、电机驱动的转动时间都被提前设定被可以进行远程修改。
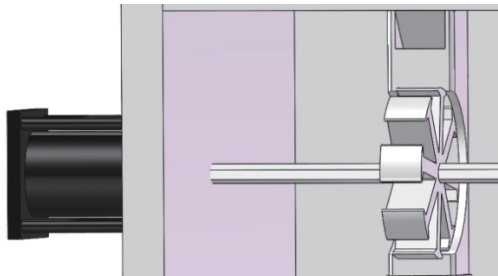
图6 助喂药机器人分药内部结构
2.1.3 药物汇总机构
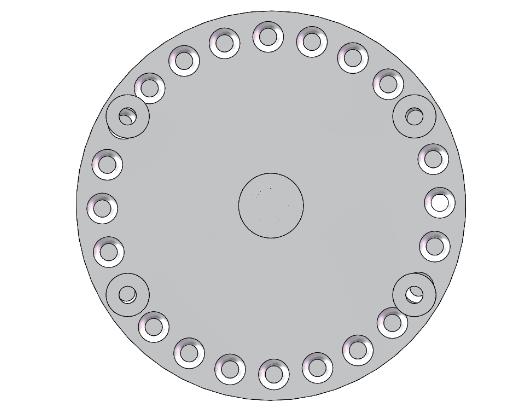
如图 7 所示,当药物从管道被分药结构梳理后继续下落,接下来就是到达我们汇总区,汇总模块由一个有 24 个圆形缺口的圆盘和在机器尾端开口的一块圆形板贴合组成。
如图 8 所示,药物最后会落入我们提前准备的盒子中,传送的整体原理是通过同步带传动和步进电机的控制使得上面的小框可以跟随同步带的移动而左右的移动。
图8 辅助喂药机器人药物传送模块

2.2 硬件
2.2.1 控制系统
(1)主控制器
本作品使用 STM32F407 系列 MCU 作为主控制器,其采用高性能 ARMCortex-M4 32 位内核,最高工作频率 168MHz,具备丰富的处理能力和高速运算能力。
(2)底盘控制部分
本作品的底盘采用四驱,每个轮毂都有独立的步进电机控制,步进电机型号采用 57 系列的步进电机和 TB6600 驱动器和 Arduino 控制。
结合上述需求,我们选用如图9、10 电机控制模块,其控制简单,稳定性好。
图9 步进电机及其驱动器

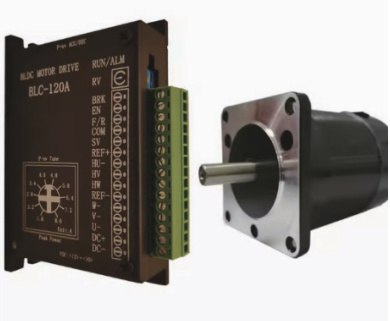
图10 直流无刷电机及其驱动器
2.2.2 电源控制
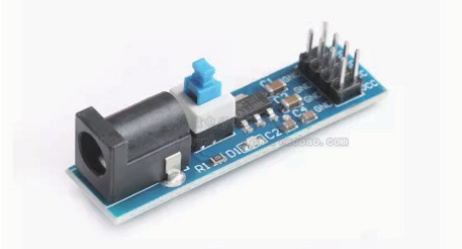
本设备模块多,需求硬件数量较多,且各模块硬件需求电压杂。主控单片机,逻辑控制板采用 2S 锂电池供电,供电电压在 7.5V 左右,并连接如图 11 所示AMS1117-5.0/3.3 LDO 模块将电压稳定至 5V 或 3.3V 左右输出,提高稳定性。
图 11 AMS1117-5.0
3 结语
本文围绕智能辅助喂药机器人的设计与研发展开研究,针对人口老龄化背景下传统喂药模式的效率低下、安全性不足等问题,构建了集精准定量给药、智能定时提醒、全流程数据管理及人性化交互于一体的机器人系统。未来研究可从三方面深化:一是引入柔性抓取技术与多模态传感器融合算法,扩展药物适配范围;二是结合情感计算与个性化需求建模,优化交互逻辑与提醒策略;三是通过模块化设计与供应链整合降低制造成本,推动技术向家庭、社区养老场景的落地应用。
综上,智能辅助喂药机器人的研发不仅为智慧医疗领域的自动化服药管理提供了创新范式,更通过技术与医疗场景的深度耦合,为破解老龄化社会的长期照护难题提供了可推广的解决方案,其技术成果具有重要的学术价值与社会意义。
参考文献:
[1] 卫生健康委网站. 202 年度国家老龄事业发展公报[R]. 报告地:国家统计局,2022
[2] 钱艺倩 . 基于人工智能的养老机器人功能设计及发展研究 [D]. 管理学院,2016
[3] 药品经营质量管理规范 [Z]. 国家食品药品监督管理总局,2016 年(国家食品药品监督管理总局令第 13 号
[4] 中国医药包装协会 . 空心胶囊规格尺寸及外观质量:GB/T1.1—2009[S]. 北京 : 中国标准出版社,2020: 6.
项目基金:2025 年大学生创新项目 项目代码:cs2501012
作者:王守昊(2006-),男,本科在读,从事结构设计,论文撰写研究(2797078572@qq.com )
通讯作者:朱希玲(1977-),女,硕士,讲师,从事流体力学和液压元件研究(E-mail:zhuxiling@sues.edu.cn)
.jpg)
.jpg)
.jpg)
.jpg)