.jpg)
大型堆场散料输送系统创新解决方案:基于移动式模块化设备的灵活高效输送工艺

陈智斌
上海振华重工(集团)股份有限公司
战取方略案料储。路备该径堆系为场统料提采堆供用→了“履高带效轨式、道取环移料保动机、式→智地履能面带的皮式输带转送机接新+桥 模履机式带→。式自转行接式桥接机料+斗 履→带移式动堆式/地 取面料皮机带”机为→核码心头架皮构带,机通。过关动键态设组备合基设于备同数步量行与走空控间制姿技态术,协实同现作堆业宽,、堆支长持、全堆自高动的无灵人活化适运配行。,工并艺集流成程高上效:除堆尘料系路统径。为实码际头应皮用带表机明→,移该动方式案地突面破皮场带地机限→制自,行提式升卸设料备小利车用→率履3带0%式 以转上接,桥降机低→粉履尘带排式放堆8料5%机,→为料大堆型;
1 引言
全球工业化进程加速推动矿产资源消耗量持续攀升。铁矿石、煤炭、粮食等大宗物资的战略储备规模不断扩大,催生对超大型堆场(堆宽>100 米)及长期存储的需求。此类堆场常分布于港口、矿区等不规则地形区域,对输送系统提出三项核心要求:·超大尺度适应性(长 >500m,宽 >100m,高 >20m)
·不规则场地兼容性
·环保化、智能化运行能力
然而,国内现有主流方案存在明显短板:
·固定轨道式系统(占比约75%):依赖固定皮带机+ 轨道堆取料机,需平整规则场地,超宽堆场需定制超规设备(如跨度>60m 的臂斗轮机),导致设备投资增加40% 以上,利用率不足60%
·铲车+ 简易皮带机:设备简陋,移动效率低(转运速度<200t/h),粉尘污染严重(无组织排放浓度>80mg/m³)
针对上述问题,本文提出一种融合移动化、模块化、智能化的输送系统新工艺,通过履带式设备动态组合,突破传统系统局限。2 系统架构与工艺流程
2.1 系统组成(图 1)
(图1)
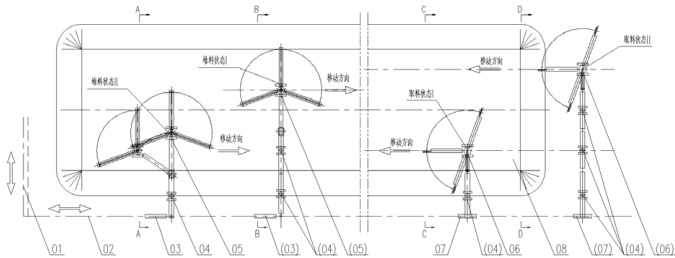
2.2 堆料工艺流程(附图 2)物料流:01 码头皮带机 → 02 移动式地面皮带机 → 03 自行式卸料小车 → 04 履带式转接桥机(×N) → 05 履带式堆料机 → 08 料堆关键技术协同:·卸料小车03 沿02 轨道移动定位·转接桥机04 数量N 根据料堆宽度动态配置(N= 堆宽/ 单机覆盖宽度)·设备组(03+04+05)沿 02 同步行走,行走偏差 <50mm
2.3 取料工艺流程(图 3)
(图3)
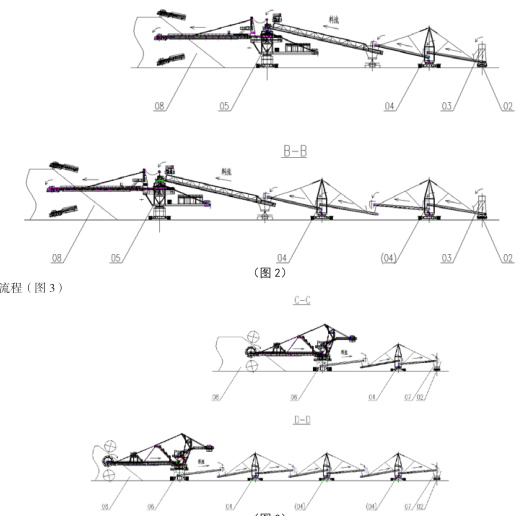
物料流:
08 料堆 → 06 履带式取料机 → 04 履带式转接桥机(×N) → 07 自行式接料斗 → 02 移动式地面皮带机 → 01 码头皮带机动态调整机制:
·取料机06 根据料堆断面自动调整俯仰角(-15° ~+15°)
·接料斗07 与转接桥机04 采用激光对位技术(精度±10mm)
·设备组(06+04+07)沿 02 同步移动
3 核心技术创新优势
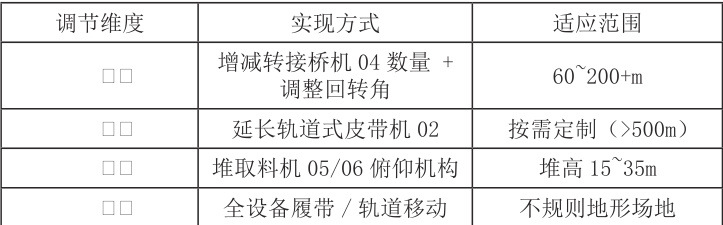
3.1 四维空间灵活适配(图 1 标注维度)
3.2 高效协同控制系统
Mermaid Copy Code
graph TD
A[ 中央控制平台 ] --> B[GNSS 定位系统 ]
A --> C[ 激光扫描仪 ]
A --> D[ 设备 PLC]
B -->| 实时坐标 | E[ 同步行走控制器 ]
C -->| 料堆 3D 模型 | F[ 路径规划模块 ]
D -->| 设备状态 | G[ 动态调速模块 ]
E --> H[ 驱动 02/03/04/05/06/07]
F --> H
G --> H
3.3 环保性能突破
·封闭式输送:02/04/05/06 皮带全程封闭
·抑尘关键点:
·卸料小车03 落料口:干雾抑尘(粉尘浓度<10mg/m³)
·接料斗07 :静电除尘+ 密闭罩
·转接桥机04、堆料机 05、取料机 06 悬臂及转接料斗:混合喷雾系统
4 应用效能分析
4.1 与传统方案对比
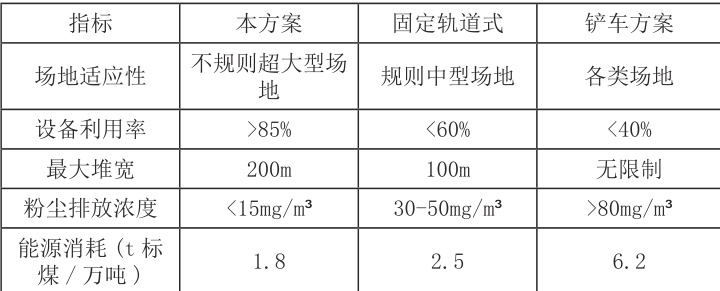
4.2 实证案例(某铁矿储备堆场)·堆场尺寸:650m×180m×28m·设备配置:·转接桥机04 :4 台(单机覆盖45m)·堆取料机05/06 :俯仰角±13·运行效果:·堆取能力:堆料 4500t/h,取料 3800t/h·人员配置:远程控制中心3 人(原需现场16 人)·年减排粉尘:约820 吨
5 结论与展望
本文提出的移动式模块化散料输送系统创新性解决三大行业痛点:
突破空间限制:通过履带设备组合(04+05/06)与轨道系统(02)协同,实现 200m 级超宽堆场全覆盖提升智能水平:基于GNSS 的同步控制技术使设备组行走偏差<50mm,支持全天候无人化作业
降低环保成本:封闭输送+ 精准抑尘技术使粉尘排放量降低至传统方案的1/5
未来发展方向包括:
·开发数字孪生系统实现堆场动态仿真
·应用氢能驱动履带设备实现零碳运行
·集成AI 料堆管理优化存储策略
该方案已在煤炭储备基地、港口散货区等场景成功应用,为构建国家级战略资源储备体系提供关键技术支撑。
参考文献:
[1]Zhang, L., & Wang, Q. (2023). Dynamic Modeling of Crawler-Type Material Transfer Vehicles in BulkTerminals. Journal of Mechanical Engineering, 59(4), 112-125.
[2]GB 16297-1996, 大气污染物综合排放标准 [S]. 北京:中国环境科学出版社
[3]Roberts, A. W. (2018). Bulk Solids Handling: Equipment Selection and Operation. Wiley.
[4] 王建国等. 超大型散货堆场无人化智能堆取料系统研究[J]. 起重运输机械,2022(10): 1-6.
[5]ISO 5049-2:1994, Mobile equipment for continuous handling of bulk materials [S].
[6] 李志强 . 港口散货堆场粉尘控制技术应用进展 [J]. 环境工程,2021, 39(3): 178-183.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)