.jpg)
基于量子粒子群优化RVM 的舰船柴油机智能监控

杨源远 谷嘉兴 徐起秀 杜书贵
中国船舶集团第七〇三研究所无锡分部 江苏无锡 214026
引言
随着物联网、大数据、云计算、人工智能等新一代信息技术的不断发展,船舶行业智能化升级和结构调整迎来了提质增效的发展机遇。针对我国船舶行业供给侧结构性改革,工信部相继印发了《智能船舶发展行动计划》和《智能船舶标准体系建设指南》,智能船舶已成为船舶领域研究和发展的重点 [1]。中国船级社发布的最新《智能船舶规范》(2024) 明确规定了智能船舶六大模块之一为智能机舱,而船舶动力装置系统及设备的高度智能化是实现智能机舱的基础和前提。
柴油机系统作为舰船推进系统中的核心, 由于其结构复杂, 长期处于潮湿、腐蚀和振动等恶劣环境,其功能性对舰船运行的可靠性有重大影响 [2]。从应用角度而言,现阶段无法大规模的建立机理模型或监测振动信号来实现舰船柴油机的状态监测。由于目前能够采集到的机舱数据的种类和数量丰富,基于数据驱动的健康状态评估方法被广泛研究与应用 。例如,基于机器学习重构模型实现构件实时状态监测与故障检测,利用优化多核相关向量机诊断滚动 承早期故障。将相关向量机算法引入状态监控领域,通过对历史数据分析,能够有效地对设备进行状态监控。与传统定期维护相比,基于运行数据分析进行的柴油机状态监控可指导工作人员制定科学系统的维修管理体系,克服了维修过剩的缺点,大大降低了人力和物力的浪费
本文针对智能船舶运维现状,深挖舰船柴油机系统参数变化规律,选择最大爆发压力作为表征柴油机运行状态的研究参数,通过灰色关联分析方法提取与之相关的特征向量,采用 RVM 引入 QPSO 方法对重构模型进行优化,构建柴油机状态监控模型。该方法可实现对柴油机运行状态的远程实时监控和状态评估,随时了解运行情况并实现故障快速预测,进而提高舰船智能运维的水平。
1 模型构建方法
为了实现舰船柴油机状态监控,需要基于 QPSO-RVM 构建数据驱动的重构模型。在正常运行状态下,重构模型的输出结果与实际数据的残差值很小,但如果柴油机系统处于非正常状态,实际数据会偏离模型输出值。通过重构模型的输出结果与实际测量数据之间的残差变化可实现状态监控。各部分的具体方法介绍如下。
舰船监控报警系统中采集的数据,存在由于通信故障、传感器或信号处理错误和噪声干扰造成的字段缺失、重复和错误等问题,可通过以下方法过滤掉缺失和垃圾数据:
(1) 过滤掉缺少输入或输出参数值的数据向量;
(2) 过滤掉所有与舰船柴油机系统处于停机状态相对应的数据向量(3) 过滤掉柴油机设备启停前后对建模影响较大的数据向量。
鉴于舰船监控报警系统采集的参数量比较庞大,需要对参数进行特征向量提取,避免冗余数据造成建模的维数灾难,本文通过灰色关联分析方法提取相关变量。
1.2 重构模型建立
舰船柴油机状态监控系统的重要组成部分是重构模型,本文采用 RVM 算法建立重构模型。RVM 是一种基于贝叶斯框架的特征变量分析方法,在先验参数的结构下基于主动相关决策理论来移除不相关的点,从而获得稀疏化的模型。相关向量体现了数据中最核心的特征,同支持向量机(Support vector machine,SVM) 相比,RVM 极大地减少了核函数的计算量,并且克服了所选核函数必须满足Mercer 条件的缺点。
1.3 量子粒子群优化算法
为了提高模型的准确度,本文采用 QPSO 方法优化 RVM 重构模型。QPSO 算法是对粒子群优化 (PSO) 算法的一种改进,通过模拟量子系统中态叠加性的强不确定性,使得 QPSO 算法能够在迭代过程中仍旧有概率覆盖整个搜索空间,改进了其他一些粒子群优化算法在粒子位置变化上缺少随机性,在搜索过程的末尾失去全局搜索能力,导致陷入局部最优陷阱的缺点。该算法中粒子仅更新位置,没有速度的概念,设计一个合理的势能场,寻找粒子逐渐收敛的一个吸引子,在迭代过程中不断吸引粒子群中的粒子靠近。
2 实例分析
为验证本文所提出模型的有效性,应用某船实际运行过程中采集到的状态参数进行实例分析和故障状态监控。选择2019 年2 月1 日-28日船舶监控报警系统记录的运行数据作为样本,将能够表征柴油机运行状态的爆发压力参数作为模型重构对象。2.1 参数选择和处理
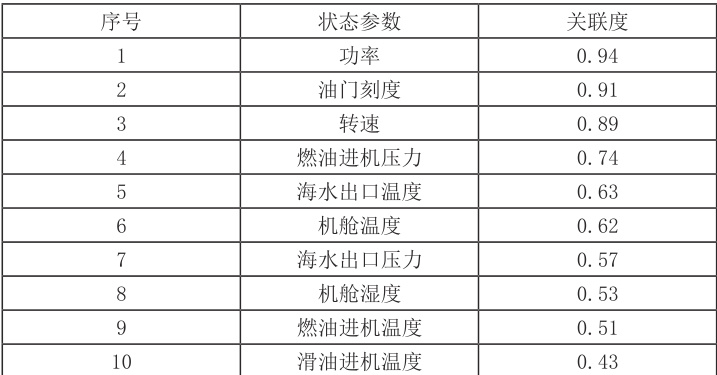
系统采集的状态参数中存在一些与柴油机爆发压力不相关的特征向量,为了防止数据冗余造成模型过于复杂、训练时间长等问题,通过灰色关联分析法来提取相关特征向量作为模型的输入数据。如表 1 所示为状态特征参数与柴油机爆发压力参数之间的关联度计算结果。根据表1 结果可知,选择前3 项作为模型输入数据可减少冗余的输入数据,提高模型计算效率。
表1 关联度计算结果
2.2 方法验证
在用 RVM 等监督学习方法进行重构之前要先对样 学习训练以获得重构模型,运用训练的样本数据分为输入样本和输出样本两部分。输出样本是指可表征舰船柴油机运行状态 本文选择的是最大爆发压力,输入样本通常为对输出样本有影响的变量,本文通过 2.1 节的工作进行选择。选取总体数据集 测量参数作为训练样本集,后续的 100 组数据作为测试样本集,验证所提出的方法的可行性。 用经 和处理过后的训练样 训练 QPSO-RVM 模型,得到模型的超参数,并用测试样本集进行重构结果测试。同时用相同的样本集训练 RVM 模型、经过 QPSO 优化的 SVM 模型以及未经过优化的SVM 模型,所得结果如图1 所示
图1 4 种模型重构结果对比
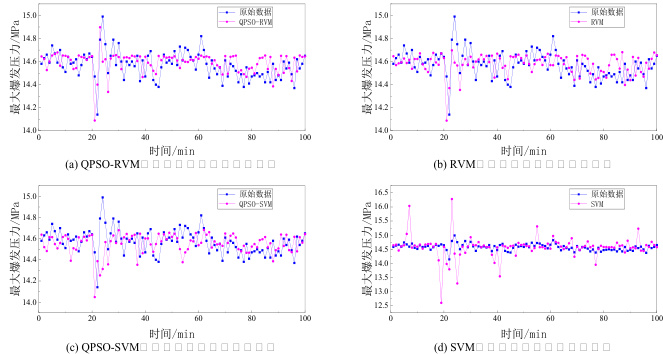
由图1 可知,通过与其他3 个模型的对比,经QPSO 优化的RVM 模型比其他模型重构效果良好,而未经优化的SVM 模型效果最差。图2给出了 QPSO-RVM 模型的残差结果,残差大部分集中在 -2 和 2 之间,表明模型重构数据的变化趋势与实际数据吻合度较高,进一步证明了模型的可用性。
同时,应用平均绝对误差 (MAE) 和均方根误差 (RMSE) 作为模型的精度指标,对上述 4 个模型的重构精度进行计算,结果如表 2 所示。通过各项指标比较可知,QPSO-RVM 模型的重构精度指标结果均优于其余 3 个模型。综合图表内容可以看出 QPSO-RVM 模型重构结果良好,建立的模型能够准确反应该时间段内的最大爆发压力的变化情况,可应用于柴油机的状态监控。
图 2 QPSO-RVM 模型重构数据残差结果
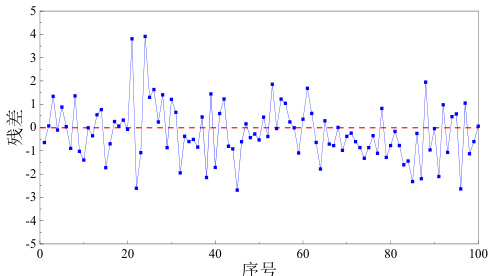
表2 不同模型重构精度指标

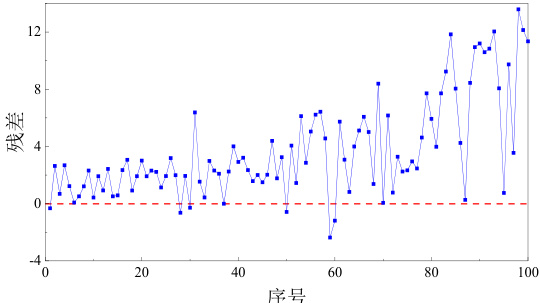
2.3 故障监控当舰船柴油机系统出现故障时,重构数据与实际测量结果之间的残差将会增大,利用残差的变化可以识别出异常情况,进而实现故障监控。考虑到工况和外部环境多变性会对重构模型的训练造成较大影响,故训练样本的时间跨度不应该很大,选取 2 月 18 号故障出现前正常运行时的500 组最大爆发压力数据作为训练样本,之后异常上升部分的100 组样本数据进行故障验证,模型重构结果如图3 所示。
图3 故障情况下重构结果
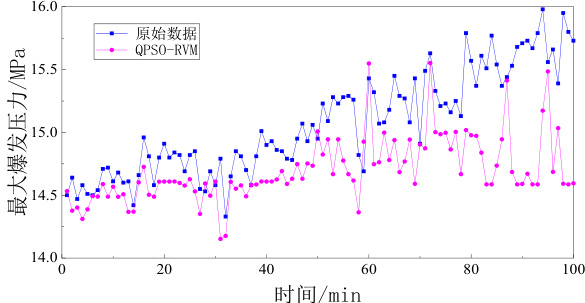
由图 3 可知,当舰船柴油机系统处于故障情况下运行时, 实际采集故障数据的真实值与重构结果之间有较大的偏差,表明此时已经出现了异常状况。同时根据图 4 的模型残差结果可 时残差最大值已经接近 14 左右,根据该结果也可判断出此时柴油机系统处于异常运行情况。故障情 构模型可实现柴油机的状态监控,同时在监测到异常时可发出故障预警。
图4 故障情况下残差结果
3 结论
本文提出的基于数据驱动的状态监控重构模型,利用 RVM 模型稀疏性和泛化性能更好的优点,同时应用 QPSO 方法进行优化,使重构模型更加准确。与表现最差的 SVM 模型相比,该模型精度指标平均绝对误差和均方根误差分别降低了 57.96% 和 69.95%。相关数据表明QPSO-RVM 模型应用于柴油机状态监控可取得更好的效果。在爆发压力参数异常上升时,能够准确识别出异常情况,追踪状态参数波动的变化,实行更合理的修护管理方案,结合重构数据,运用适当的状态评估方法可实现对目标对象未来一段时间的状态预测,实现对早期故障的预警,为剩余寿命预测以及视情维修奠定基础,是实现智能机舱的重要一步。
参考文献:
[1] 许维明 , 瞿荣泽 , 薛国良 , 等 . 智能船舶系统研究现状及发展趋势 [J]. 船舶 ,2023,34(04):46-55.
存 胡以怀 船用低 机的 障模拟 电 程技术 0(02):55-60.
[3] 谭阳辉. 基于数据驱动的船用燃气轮机推进系统健康状态评估研究[D]. 大连海事大学,2023.
[4] 曾强, 黄政, 魏曙寰. 基于模糊理论和贝叶斯网络的燃气轮机健康状态评估方法[J]. 科学技术与工程, 2020, 20(11): 43669.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)