.jpg)
基于模型预测控制的无人小车轨迹跟踪控制研究

胡子慧 赵妍 胡俊楠
景德镇陶瓷大学信息工程学院 江西省景德镇市 333403
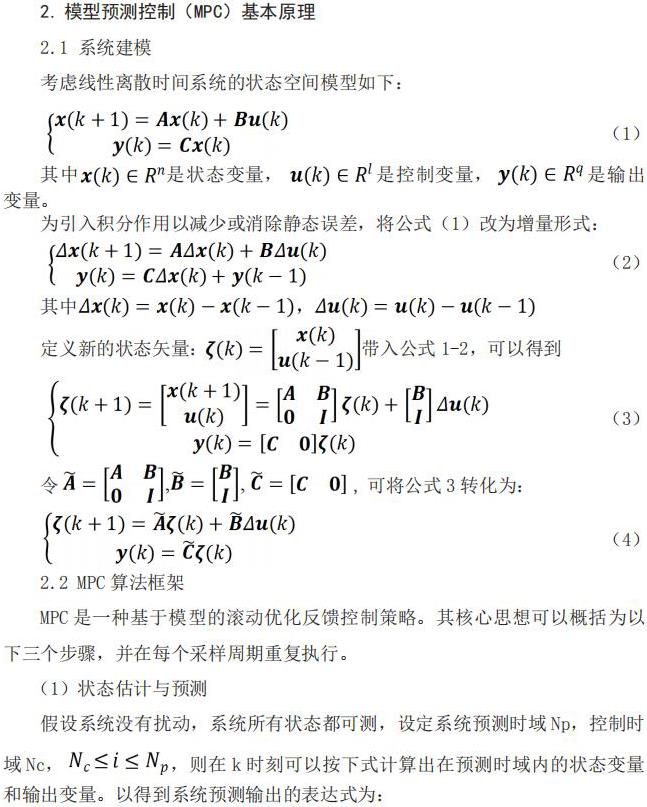
1. 引言
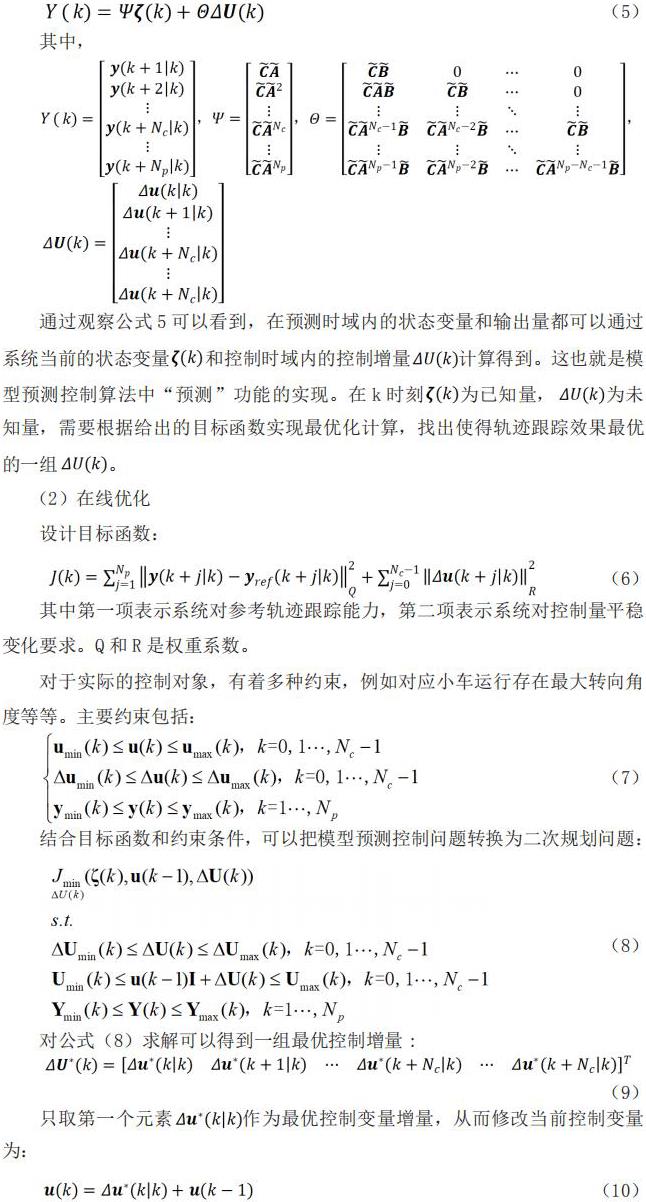
随 着 人 工 智 能 与 机 器 人 技 术 的 迅 猛 发 展, 无 人 小 车(AutonomousGuidedVehicle,AGV)在工业自动化、智慧物流、特种作业等领域的应用日益广泛。实现无人小车高精度、高鲁棒性的轨迹跟踪是其自主导航和执行任务的基础与关键。
轨迹跟踪控制的核心目标是设计控制律,驱使小车输出的实际位姿(位置和航向角)尽可能快速、准确地跟踪给定的期望参考轨迹。该问题面临诸多挑战:无人小车通常具有本质非线性动力学 / 运动学特性。实际系统存在物理限制,如电机转矩 / 电压限幅、转向角范围限制、速度限制等。传统的控制方法如 PID 控制、反馈线性化、滑模控制等在该领域得到了广泛应用,但各有其局限性(如 PID 处理非线性和约束能力弱,滑模控制存在抖振)。模型预测控制(MPC)凭借其显式处理约束、直接利用模型进行多步预测优化、天然处理多输入多输出(MIMO)系统的优势,在无人小车轨迹跟踪控制中展现出强大的潜力和显著优势,成为当前研究与应用的热点。
本文旨在深入探讨基于 MPC 的无人小车轨迹跟踪控制方法。详细介绍 MPC的核心原理,阐述基于小车运动学模型的MPC 控制器设计,通过详细的仿真实验,对比分析MPC 与PID 控制的跟踪效果。
(3)实施控制与滚动
系统执行这一控制量,在被控对象执行完此刻的控制指令后,继续在下个周期据更新后的状态量作为初始值重新进行预测输出,同时再次求解带约束条件的二次规划问题得到最新的控制增量序列,再将得到的第一个元素作用于当前系统,循环往复以此实现滚动优化的效。
3. 基于MPC 的无人小车轨迹跟踪控制器设计
3.1 无人小车运动学模型
本文采用广泛使用的两轮差速驱动机器人运动学模型。其位姿状态定义为x=[x,y,θ]T ,其中 (x,y) 为后轴中心(或几何中心)在全局坐标系下的坐标,θ 为车体航向角(与 X 轴夹角)。控制输入为线速度 v 和角速度 ω。其连续时间运动学方程为:
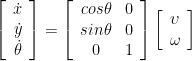
对其进行离散化,得到离散时间状态方程,设计 MPC 控制器,使小车位姿x(k) 跟踪给定的时变参考位姿轨迹  ,同时满足输入约束(如速度范围、角速度范围)和控制量变化率约束(保证控制平缓)。
,同时满足输入约束(如速度范围、角速度范围)和控制量变化率约束(保证控制平缓)。
3.2 MPC 控制器设计
为了验证所设计的 MPC 控制器的性能,设计了 MPC 的相关参数如下,并进行仿真分析:预测时域 Np=20 ,控制时域 Nc=5 ,采样时间 Ts=0.1s 。权重矩阵:Q=diag(10,10,1) ( 位置误差权重 > 航向角误差权重), R=diag(0. 1,0. 1) ( 控制增量权重)。
给定约束:线速度 Δv∈[0,2]m/s ,角速度ω  ,线速度增量Δv∈[-0.5,0.5]m/s2 ,角速度增量Δω ∈[-0.8,0.8]rad/s2 。
,线速度增量Δv∈[-0.5,0.5]m/s2 ,角速度增量Δω ∈[-0.8,0.8]rad/s2 。
3.3 仿真结果分析
图1 MPC 和PID 轨迹跟踪仿真对比图
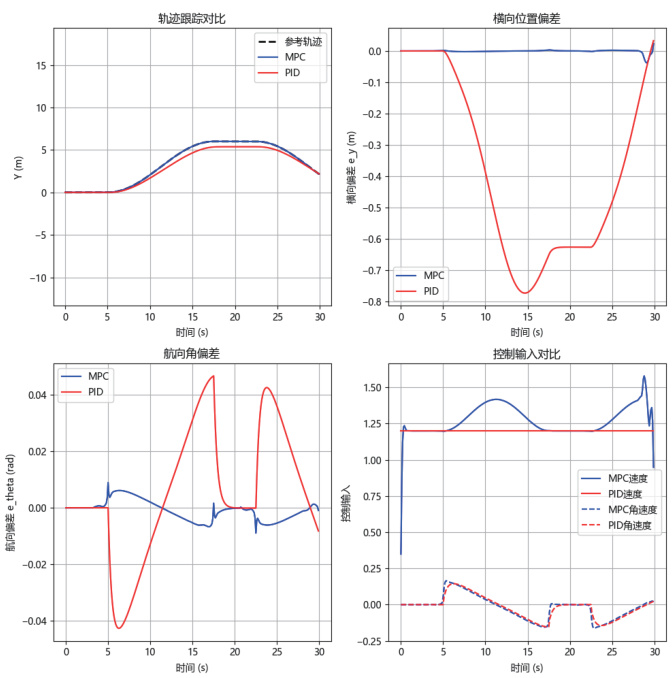
如图 1 所示,PID 控制在直线段跟踪效果良好。在路径曲率突变处(如移线开始和结束时)出现显著的跟踪超调和振荡。最大横向位置偏差可达 0.25米以上,航向角跟踪也存在滞后和波动。MPC 控制整体轨迹跟踪非常平滑、紧密地贴合参考轨迹。横向位置偏差显著减小,最大偏差控制在 0.05 米以内。在路径弯曲处过渡自然流畅,无明显超调或振荡。航向角跟踪也更准确、及时。
PID 控制生成的角速度 ω 在路径弯曲处和干扰发生时变化剧烈,存在高频“抖动”现象。线速度 v 设定为常数,变化不灵活。MPC 控制生成的角速度 ω和线速度 Δv 变化均显著平滑。在转弯前,MPC 会提前开始平缓地增大转向角速度;在直道前,会提前开始平缓地减小转向角速度。控制量变化率被显式约束限制在合理范围内,避免了执行器的急剧动作。有时会根据跟踪误差和约束,智能地调整线速度(如稍微减速以利于更平稳地过弯),这是固定速度 PID 无法做到的。
4. 结论
本文深入研究了基于模型预测控制(MPC)的无人小车轨迹跟踪控制问题。
通过分析研究现状,阐述了传统方法(尤其是 PID 控制)在处理非线性、约束和动态性能方面的局限性,并详细介绍了 MPC 的核心原理及其显式处理约束、多步预测优化的核心优势。
针对典型的差速驱动机器人,设计了基于运动学模型的 MPC 轨迹跟踪控制器,将跟踪控制问题转化为带约束的二次规划(QP)问题在线求解。,以具有挑战性的双移线轨迹为参考,进行了详尽的仿真实验,并与精心整定的 PID 控制器进行了全面对比。
仿真结果表明:MPC 在跟踪精度上具有压倒性优势,其位置和航向跟踪误差均显著低于 PID 控制;在复杂路径(曲率突变)下,MPC 实现了无超调、无振荡的平滑过渡,而PID 则表现出明显的振荡和滞后。
综上所述,MPC 凭借其预测优化和约束处理能力,为无人小车轨迹跟踪提供了高性能解决方案。未来工作将结合动力学模型、深度强化学习等方法进一步提升性能,并推进实物平台验证。
参考文献:
[1] 毛凯 . 基于改进 MPC 的 AGV 轨迹规划与跟踪 [D]. 杭州电子科技大学 ,2024.
[2] 孙银健 . 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京理工大学 ,2015.
[3] 张志铭 . 基于模型预测控制的车辆轨迹规划和控制研究 [D]. 浙江大学 ,2022.
[4] 由智恒 . 基于 MPC 算法的无人驾驶车辆轨迹跟踪控制研究 [D]. 吉林大学 ,2018.
[5] 甘露 , 夏青元 . 基于 MPC 自适应优化的车辆轨迹跟踪控制 [J]. 计算机与数字工程 ,2025,53(05):1279-1285.
[6] 李士强, 张肖景, 闫光玉. 基于MPC 的无人驾驶汽车轨迹跟踪研究[J].专用汽车 ,2025,(04):73-74+91.
[7] 杜荣华 , 胡鸿飞 , 高凯 , 等 . 基于变预测时域 MPC 的自动驾驶汽车轨迹跟踪控制研究 [J]. 机械工程学报 ,2022,58(24):275-288.
[8] 张喜清 , 李进 , 陈殿民 , 等 . 基于模型预测控制的智能车辆轨迹跟踪仿真 [J]. 计算机仿真 ,2024,41(10):114-120.
[9] 贾伟健 , 刘西侠 , 王可 , 等 . 基于 MPC 的无人履带车辆轨迹跟踪方法研究 [J]. 计算机仿真 ,2024,41(05):429-435.
[10] 曹强 , 党晓圆 , 高俊 , 等 . 模型预测控制理论的研究与应用 [J]. 自动化应用 ,2024,65(09):8-14+18.
作者简介:
第一作者:胡子慧,1991.08,女,汉族,人,硕士研究生,讲师,研究方向: 自动化
第二作者:赵妍,1997.06,女,汉族,人,硕士研究生,助教,研究方向: 机器学习
第三作者:胡俊楠,1996.02,男,汉族,人,硕士研究生,助教,研究方向: 计算机视觉
课题来源:江西省教育厅科学技术研究项目 : 基于模型预测控制的无人车轨迹跟踪算法研究课题编号:GJJ211347
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)