.jpg)
基于UWB 技术双定位模式的共享跟随系统及其功耗研究

曹璐云
湖南信息职业技术学院电子工程学院 湖南长沙 410200
0. 引言
目前,现有的基于 UWB 的跟随技术主要在载物车、婴儿车、机器人、行李箱等产品中增加一套基于 UWB 技术的自动跟随系统来实现目标跟踪功能,系统主要结构包括核心控制模块、驱动模块、UWB定位模块等组成,UWB 定位模块将跟随装置与标签之间测得距离值传递给核心控制模块,控制模块通过定位算法得到 UWB 标签坐标,并计算出基站与标签之间的偏转角,从而控制电机的转角和转速。然而,现有 UWB 的跟随系统存在两个方面的问题:(1)现有的跟随装置如王凤、冯维 [1] 公开的一种基于 UWB 标签的共享智能跟随装置,在搬运结束后停留在原地,若发生移动后则与数据库服务器断开通信,无法对设备进行维护和管理。(2)当前UWB 跟随系统的定位模式单一。要么采用分布式定位模式要么全局定位模式。然而,两种定位模式各有优劣:分布式定位模式无需预设固定参考点,适用于实时追踪场景,但在商场、机场等大规模场景中,基站充电、管理和维护困难;全局定位系统精度高、稳定性好,能提供精准定位与导航服务,但运行时计算量和通信量大,大规模应用场景下总体能耗高,对系统成本和技术难度要求更严格。
1. 系统架构
基于 UWB 技术的双定位模式的共享跟随系统,其结构如图 1 所示,包括云端服务器、UWB 基站、跟随机器人、跟随APP 功能模块,各个模块通过无线方式建立通信网络。其中,云端服务器主要作用是存储系统设备和用户数据、处理和分析大量数据,例如转换经纬度坐标为全局坐标系下的三维坐标、租赁费用核算等、负责与系统内的其他设备进行信息交换和通信,是整个系统数据传输的枢纽。
图1 系统架构图
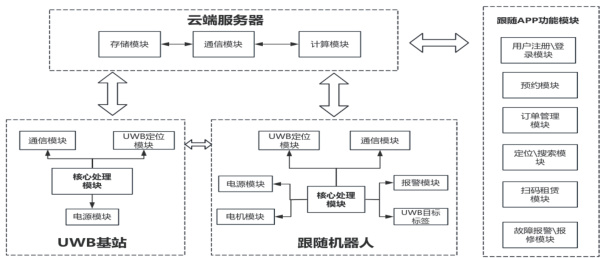
UWB 基站主要作用是实现基站与云端服务器的无线通信功能和控制 UWB 定位模块功能;跟随机器人主要功能是在全局定位模式和分布式定位模式两种不同模式下,获取跟随机器人自身的位置并与系统外部设备进行通信;UWB 标签主要是实现目标跟踪的装置,可选择卡扣 \ 吸磁 \ 手环等多种佩戴方式;所述跟随系统 APP 功能模块包含:用户注册\ 登录、定位\ 搜索、预约、扫码租赁、订单查询\ 支付、订单评价、故障报修等模块。
2. 系统双定位模式
系统依据任务内容将该控制划分跟随和回归双定位模式,其中,跟随模式下采用分布式(局部)定位方式,以随机器人的三个定位模块为基站来确定标签的相对位置;回归模式下采用全局定位方式,以UWB 基站的全局坐标来确定标签的相对位置。
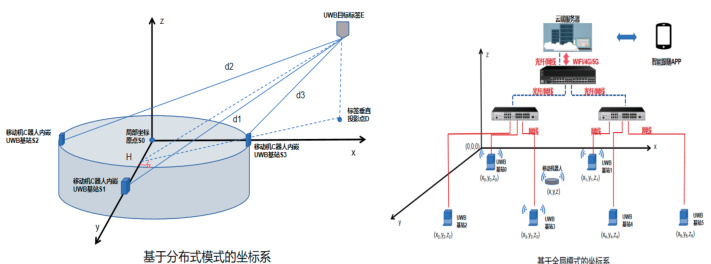
当处于跟随模式中,系统将UWB 基站状态设置为深度休眠状态,同时启动跟随机器人的三个定位模块工作状态并建立局部坐标系,如图 2 所示,跟随机器人通过与标签的通信确定标签的相对位置;当系统处于回归模式时,停用跟随机器人的第二及第三定位模块,同时切换全局坐标系,通过用户终端经纬度位置信息转换方式,获取跟随机器人在全局地图坐标系中的坐标。基于跟随机器人的全局坐标,确定目标 UWB 基站及至少三个协同定位基站。在回归过程中,若检测到周边不足三个UWB 基站可正常通信,跟随机器人应立即上报服务器。服务器依据其坐标位置,重新选定距其最近的三个基站,并下发指令激活选定基站。
图2 基于分布式模式的坐标系和基于全局模式的坐标系
3. 双定位模式功耗分析
3.1 室内二维定位场景下 DW1000 芯片的最大通信距离分析
根据国际电信联盟(ITU)及区域标准(FCC/ETSI)对超宽带(UWB)设备等效全向辐射功率(EIRP)的限制,UWB 设备在3.1~10.6GHz 频段内EIRP 密度均值限值为 -41.3dBm/MHz 。若基于
DW1000 芯片的 UWB 系统带宽为 500MHz ,其最大允许发射功率为−14.3dBm 。根据非视距(NLOS)场景下有路径损耗(PL(d))公式:
PL(d)=PL0+10nlog10(d/d0)+Xσ (式 1-1)
本文根据参考文献 [2] ~文献 [3] 实测数据,将 PL0 、n、Xσ参数取值分别设置为 43dB、3.5、8dB,PL(d) 取最大允许路径损耗(PLmax )值 92.7dB ,将其代入式 1-1,求解最大通信距离 d 约为24.5m 。此结果与文献 [3] 的( 15-25m )实测范围一致。
3.2 系统整体功耗分析
针对 400m×200m 单层室内场景,基于前文计算得出的 24.5m 通信距离,以向上取整方式,计算得出该场景的基站数量N 约为 180 个,同时考虑覆盖盲区,系统需要按 5% 覆盖冗余补充中继节点,因此在400m×200m 室内场景中共部署190 个基站。
3.2.1 单基站功耗模型
基于 DW1000 的 UWB 基站(仅由 DW1000 芯片、MCU、存储模块及外围模块组成)正常收发和深度休眠两种状态下的电气参数(根据DW1000 数据手册、STM32 系列MCU 规格书及行业实测数据),如表1 所示:
表1 基站模块功耗参数
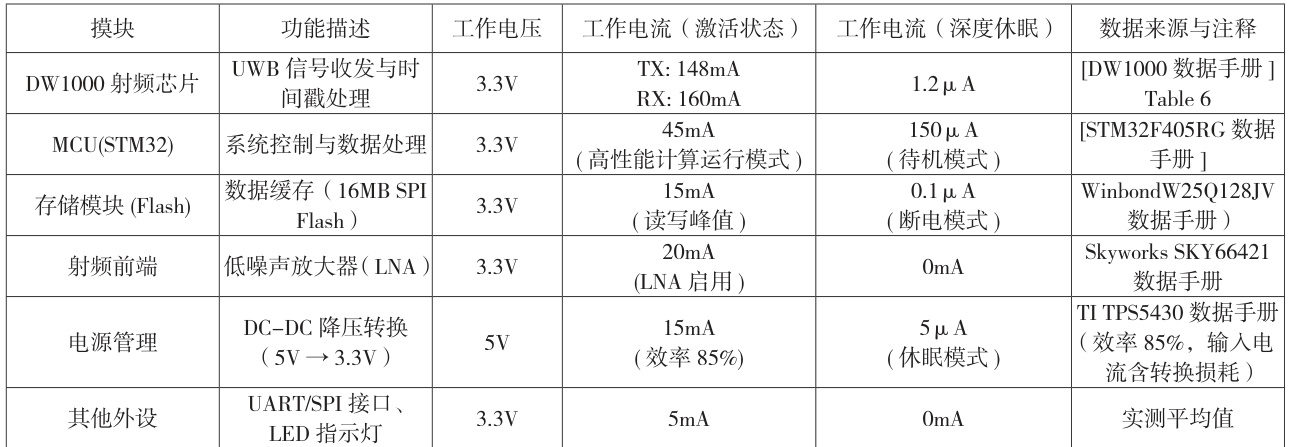
根据表 1,可分别算出单基站在正常收发和深度休眠两种状态下的功耗。
(1)正常收发状态下单基站功耗
平 均 激 活 功 耗( 假 设 50% TX, 50% RX): Pactive=(PTX+PRX), )/2=0.864W
上述超宽带基站的能耗计算是在结构较为简易的情形下进行的,因此,计算得出的能耗低于现有基站产品的功率(包括额定功率和实际功率)。
(2) 深 度 休 眠 状 态 下 单 基 站 功 耗: Psleep=3.3V× (1.2μA+150μA+0.1μA)+5V×2μA=0.509mW
3.3.2 系统(190 个基站)总功耗对比
根据单基站功耗计算结果,可推算出在 400m×200m 单层室内场景下,所有基站均处于正常收发状态和本文提出的双定位模式(3 基站激活,其余深度休眠)状态下的能耗。
全激活模式(190 个基站持续工作):Wtotal=N 总 *Pactive :*t=3.94 (kWh/day)。
本文提出的双定位模式(3 基站激活,其余深度休眠):Wtotal1 =3* Pactive*t+(N 总 -3)*Psleep*t=0.0645(kWh/day)。
表2 能耗对比


对比分析得出全激活模式和本文提出的节能模式能耗效果,如表 2所示,可知在 400m×200m 单层室内场景下全激活模式下,所有 190个基站持续工作,日能耗高达 3.94kWh ,年能耗更是达到了 1438.1kWh ,占据了 100% 的能耗比例。而相比之下,本文提出的双定位模式仅需要 3 个基站处于激活状态,其余 187 个基站均处于深度休眠状态,日能耗骤降至 0.065kWh ,年能耗也仅为 23.7kWh ,能耗占比仅为 1.64% ,日年节能倍数是全激活模式下的 61 倍。数据对比强烈地突出了双定位模式在节能方面的巨大优势。
综上所述,本文提出的基于 UWB 技术的双定位模式共享跟随系统,在能耗控制方面取得了显著成效,为 UWB 跟随技术的发展和应用提供了新的思路和方向。
参考文献
[1] 杭州电子科技大学 . 基于 UWB 标签的共享智能跟随及搬运系统及方法 :201810397284.0[P].2020-11-13.
[2] A. F. Molisch, "Ultra-Wideband Propagation Channels," Proc. IEEE, 2009.
[3] S. S. Ghassemzadeh et al., "UWB Path Loss Characterization in Residential Environments," IEEE Trans. Antennas Propag., 2005.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)