.jpg)
棚内葡萄叶面肥自动喷洒装置设计

李彤 王光明 王耀 巨欣
西昌学院 四川省西昌市 615000
引言
葡萄作为我国重要经济作物,种植面积扩大使病虫害防治成关键,当前人工或传统机械喷洒存在不均、浪费、效率低等问题,葡萄专用叶面肥自动喷洒装置可改善这些情况 [1]。国内外学者对此研究较多,发达国家以大中型植保机械为主,集成多种技术,可靠性与适应性强,但成本高且难适应我国复杂地形与多样种植需求;国内研究集中在智能识别等方面,效果显著但成本控制等仍待提升。为此,本文自主研发葡萄自走式叶面肥施药装置,优化结构参数与控制系统,明确核心部件机理,提升作业精度与效率,经实验验证性能,为葡萄病害防治提供理论与实践支持。
1 装置整体设计
葡萄叶面肥自动喷洒装置旨在实现高效、精准的作业,优化农业喷洒过程。该机整体布局主要由四个关键部分构成:机械结构、动力系统、喷洒系统和控制系统。每个部分密切协作,共同确保叶面肥自动喷洒装置的高效运行和精准喷洒。
整机以底盘为支撑,承载各部件并保障运行稳定与机动性。底盘装有驱动板和 18650 锂电池组,为电机、水泵、传感器等核心部件供电。储药箱位于机体底部,负责药剂存储与连续供给。喷洒设备采用双侧四喷头结构,搭配可调仰角风扇及多角度喷嘴,适应葡萄植株高度差异与栽培方式多样性。
2. 喷洒系统设计
喷洒装置是叶面肥自动喷洒装置的核心技术,其设计质量直接影响药液的喷洒效果、覆盖均匀性以及防治效率。该喷洒装置由喷头、可调仰角风扇机构、滑杆、限位轮、连杆机构、药箱及型材凹槽等组成,主要参数包括喷头雾化直径、喷洒角度、风扇风力强度及仰角调节范围。喷洒系统的核心功能是通过药箱输送药液至喷头,经喷头雾化后形成细小均匀的雾滴,并在风扇的辅助作用下实现药液的精准覆盖。可调仰角风扇机构通过松开限位轮调节滑杆位置,使连杆结构灵活调整喷头仰角和风向,确保药液的覆盖范围符合植株特性,从而减少漏喷和过喷现象,提高防治效果 [2]。
3. 基于惯性导航的底盘控制系统设计
3.1 硬件设计
底盘控制系统核心为 GD32 主控芯片[3],以 72MHz 高主频和丰富接口保障高速运算与模块通信,结合 ST 公司标准库提升开发效率 [4]。系统集成 MPU6050 六轴惯导模块,通过 sPI 与主控芯片连接实现姿态数据实时采集 [5][6],主控芯片结合解算算法调整底盘运动,同时通过 I/O 接口连接电机驱动器实现稳定控制。远程遥控采用 2.4G F-06A无线模块,经 USART 与主控芯片通信,配备 32F805J 单片机,通信距离达800 米,支持复杂环境操控。
3.2 软件设计
MPU6050 惯导模块负责叶面肥自动喷洒装置的姿态采集与解算,其内置 DMP 可将三轴加速度和角速度数据实时转为四元数,经 SPI总线与 GD32 主控芯片高速通信。主控芯片解析姿态信息后,实时调节左右电机转速,实现底盘直线行驶与精准转向[7]。
为实现闭环控制、提高行驶精度,系统在驱动电机轴端集成霍尔传感器以实时反馈转速。主控芯片比对实际转速与设定值,动态调整PWM 占空比以稳定电机性能;系统设定 Speed 阈值为 80(停止)至175(最大转速),可精细控制速度范围。
系统上电后,主控芯片初始化各接口与功能模块,通过 F-06A无线模块接收遥控指令,驱动电机完成前进、转向等操作。运行中,系统持续采集姿态与速度数据,通过反馈调节校正路径,保障底盘运行稳定、轨迹精准,提升喷洒作业质量与可靠性[6][8]。
4 装置测试
4.1 测试基本条件
本次果园性能试验在四川西昌葡萄园开展,当地属热带高原季风气候,日照、降水适宜,沙质壤土肥力佳,为试验提供良好基础。选取13.33 公顷场地,满足装置性能评估与优化需求。
4.2 试验结果
试验结果表明,车体正常行驶时,底盘驱动电机实际电压36.4V、电流 0.97A,电力由 18650 锂电池组供给。该电池组能量密度高、重量轻、循环寿命长,可稳定供电。试验验证了底盘在指定区域的稳定行驶能力及对葡萄园土壤的适应性,表明该叶面肥自动喷洒装置能高效精准作业,为葡萄种植机械化提供了科学与技术支持。
5. 结论
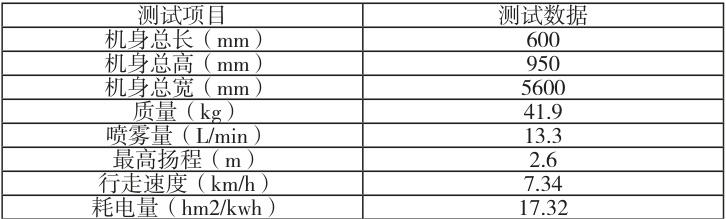
本 文 设 计 的 葡 萄 叶 面 肥 自 动 喷 洒 装 置 具 备 小 巧 机 身( 600mm×560mm×950mm , 41.9kg )、高效喷洒( 13.3L/min )和低能耗( 17.32kW⋅h/hm2 )等特点,适用于果园狭窄通道。相比市售沃达丰 3WF-400( 11.7L/min ),本机在覆盖率与防治效果方面表现更优,最大行驶速度可达 7.34km/h ,有助于提升作业效率并降低运行成本。在环保与智能化方面,设备采用模块化设计与智能控制系统,支持精准喷洒与远程操控,有效减少农药浪费与环境污染。综上,该叶面肥自动喷洒装置在结构、性能与智能化水平方面具备显著优势,契合现代果园对高效、绿色、智能农机的需求,具有广泛的推广应用前景。
参考文献
[1] 胡圣洋 , 陈泽鸿 , 刘伟康 , 等 . 基于 LoRa 的果园管道自动顺序喷雾系统研究 [J]. 农机化研究 ,2025,47(02):171-175.DOI:10.13427/j.issn.1003-188X.2025.02.026.
[2] 李冬睿 , 邱尚明 . 基于甘蔗病害智能诊断的立体化精准农药喷洒机的设计 [J]. 现代农业科技 ,2024,(01):180-185.
[3] 张强 , 杨光友 . 基于 STM32 单片机控制的电动微耕机研制 [J]. 农 机 化 研 究 ,2019,41(07):100-104+109.DOI:10.13427/j.cnki.njyi.2019.07.019.
[4] 杨通元 . 基于 GD32F103 的无刷直流电机控制电路设计[J]. 电 子 制 作 ,2024,32(01):79-82.DOI:10.16589/j.cnki.cn11-3571/tn.2024.01.025.
[5] 方旭.基于 A RM 的多通道步进电机控制系统设计[D]. 成都:西南交通大学,2014
[6] 缑新科,王能才 . 基于 PID 神经元网络的智能车控制系统研究[J]. 自动化与仪器仪表,2014(3) :89 - 90
[7] 王玥. STM32 自主定位的小车导航系统设计[J]. 单片机与嵌入式系统应用,2015(12) :19 - 22
[8] 吴冬雪 . 基于 PID 神经元网络的供热管网运行控制与仿真研究[D]. 呼和浩特: 内蒙古大学,2014
作者简介:
一作:姓名:李彤,姓别:女,民族:汉族,籍贯:四川资阳生于:2004 年 10 月,学历:本科在读,研究方向:电气工程及其自动化二作:姓名:王光明,姓别:男,民族:汉族,籍贯:四川南充生于:2001 年10 月,学历:本科在读,研究方向:机械电子工程三作:姓名:王耀,姓别:男,民族:汉族,籍贯:四川成都生于:2004 年 12 月,学历:本科在读,研究方向:电气工程及其自动化四作:姓名:巨欣,姓别:女,民族:汉族,籍贯:四川德阳生于:2004 年 11 月,学历:本科在读,研究方向:电气工程及其自动化
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)