.jpg)
基于机器视觉的自动驾驶小车

陈柳妍 王正伟 吴娇
六盘水师范学院 553004
1 引 言
随着科技的不断发展,人民经济水平的不断提升。人们出行驾驶汽车的频率大幅度增加,从而交通事故也频发。据调查分析,人们发生交通事故的主要原因有道路环境,天气情况,车辆状况和驾驶员操作技术等。尽管如今自动驾驶小车已经得到了了大量研究和发展,目前还是有很多问题有待解决:摄像头在雨雪、雾霾或逆光场景下易出现图像模糊或眩光,导致目标检测失败。复杂场景中的突发行为(如行人突然闯入)难以预测,现有模型对长尾场景(如施工区域、动物闯入)泛化能力弱。
2 工作原理及设计方案
2.1 机器视觉
机器人目标识别是实现机器人自主感知与决策的关键,使机器人从复杂的环境中提取并理解有用信息,从而进行适当的响应和行动[2]。赵鹏宇等[2]提出了一种联合ORB特征提取和Onecut分割相结合的目标提取算法,将其应用于Delta机器人目标识别中,能够满足并联机器人的抓取要求;杨宇等[3]以JetsonTX2 为控制核心,采用 YOLOv3卷积神经网络实现对动态目标的识别,所设计的系统能够实现对前端摄像头传感器 采集视频流的实时处理,具有良好的市场应用前景;刘胜书等[4]提出了一种基于HSV颜色模型和数学形态学处理的工作区域轮廓检测算法,有效提升了协作式机器人Baxter在工作中识别抓取目标物体的准确性和鲁棒性;方项等人提出YOLOv5算法的不需要产生候选区域,而是直接进行边界框的预测。
OpenCV 的图像处理主要通过使用核对图像进行卷积来实现,其图像处理主要有以下几个方面:a.读取和显示图像;b.图像模糊处理;c.图像锐化;d.边缘检测;e.图像二值化;f.图像灰度化处理。
2.2 自动驾驶的基本架构
自动驾驶系统主要由感知、决策、控制三个模块组成。感知模块通过激光雷达、摄像头和雷达传感器获取周围环境的信息,实时生成道路、交通标志、行人、其他车辆等的感知数据。决策模块根据感知数据和交通规则,规划车辆的行驶路径,并做出适应当前环境的决策,例如选择超车或避让障碍。控制模块负责根据决策指令对车辆进行加减速、转向等操作,从而实现安全稳定的驾驶[1]。三个模块协同工作,确保自动驾驶系统能够高效运行。
3 参数设计与调试
3.1 硬件设计原理
选择使用两个 ESP32 作为主控,一块专门用来转发雷达数据;另一块进行运动控制,读取传感器数据。ESP32有以下优点:
性能强劲:搭载双核处理器,主频最高可达240MHz,能轻松处理复杂任务和多任务并行运行。
功能丰富:集成Wi-Fi 和蓝牙双模通信功能,支持多种通信协议,还具备丰富的外设接口。
低功耗:拥有多种低功耗模式,适合对功耗有要求的物联网设备。
开发灵活:支持多种开发框架和编程语言,开发者可根据需求选择合适的开发方式。
性价比高:在具备强大性能和丰富功能的同时,价格相对较为亲民。

图3-1 主控芯片部分
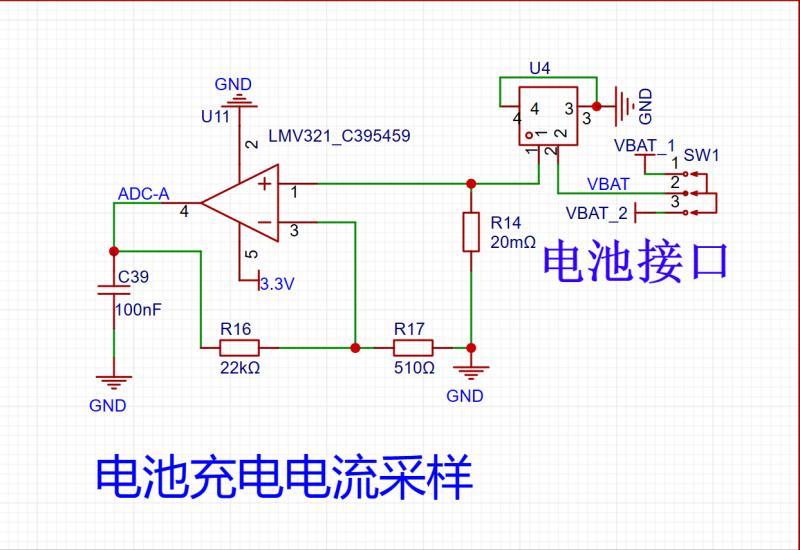
图3-2 充电电路
3.2 天线部分
采用R 天线处的π形电路参数需要根据实际的设计来调整,所以就使用网络矢量分析仪进行测试调整
具体操作步骤为:先将芯片取下,将测试线焊接到天线引脚π形滤波电路初始参数串连一个 0R 电阻。另一端接到矢量网络分析仪,扫描起始频率设置为 2.4Ghz,终止频率为 2.5Ghz,调整光标到 2.412Ghz,因为小车AP 模式使用 WiFi 为信道1 对应就是2.412Ghz 的频率。显示出天线在指定频率下的性能,驻波比为 1.838,史密斯数值为 79.26 + j25.63Ω,驻波为 1.0 时天线性能最佳。确认输入后显示对应的点,与仪器上测量的基本对应,仪器上显示的是简化版的史密斯圆,大圆的中心对应着50Ω阻抗。通过添加串联或并联的电容或电感,让测量的点尽量逼近中心,每个连接方法会有不同的特性。最后计算出需要串联1.5pf 的电容,在天线端并联10.6nH的电感即可让天线性能达到最佳。软件计算并非完全准确,还需要实际连接再做轻微调整,先将0Ω电阻替换为1.5PF 史密斯数值几乎达到中心,并不需要串联电感,最后经过测试串接2.7PF 效果最佳。天线调试就完成了,将天线取下,装上芯片即可。晶振部分需要 GND 包围做屏蔽层,走线也采用了圆弧拐角。电池设计为不可拆卸,所以添加了一个充电电路,采用TP4056 充电芯片,查看手册,根据手册画出电路,充电电流设置为400ma,充电电流根据R21 电阻的阻值来调节。
电池接口处使用一个开关控制电池是否充电,还有一个电流检测电路用于检测电池放电与充电电压,如果在没接充电器时开关是控制电源的,如果接上充电器开关就是控制是否充电的。
通过R14 电阻来检测电流,根据欧姆定律 I=U/R 也就是电流经过电阻,电阻两端会产生压差,这个压差除以R14 阻值等于经过电阻的电流,这个电阻两端的压差比较小,所以使用一个运算放大器将电压放大再给单片机检测。
电池充电电流采样
3.3 摄像头部分
天线高速线之间需要夹一根 GND 线,并且高速线之间要尽量远离,布线尽量减少拐角,不然最后摄像头的图像会受到干扰。
3.3.1 蒙特卡洛定位
蒙特卡洛定位的原理是先放出大量粒子,将每一个粒子看作是一个小车可能存在的位置,然后小车移动是不断进行判断哪个粒子的与当前传感器判断的更符合,然后不断去掉偏差太大的,然后重新放出偏差更小的,最终蒙特卡洛粒子就会聚集在小车的真实位置附近了。
3.3.2 路径规划
全局规划路径根据设置的坐标点生成一条路径,根据这个路径可以避开建图时已知的障碍;局部规划路径,在全局规划路径上遇到障碍就规划一条局部的路径绕过障碍,如果无法避开再重新进行全局路径规划;局部规划使用 DWA。
3.4 材料部分
小车轮胎采用聚氨酯橡胶材料,该材料具有聚氨酯橡胶材料具有耐磨性强、弹性优异、耐油性好、硬度可调、耐候性佳、加工方便等优点,相比其他材料,更适合本项目要求。
参考文献
[1]王晨.基于人工智能技术的智能汽车自动驾驶算法研究[J].时代汽车,2025,(09):8-10.
[2] 郭 勤 . 基 于 树 莓 派 的 自 动 驾 驶 汽 车 避 障 系 统 的 设 计 [J]. 内 燃 机 与 配件,2025,(08):28-30.DOI:10.19475/j.cnki.issn1674-957x.2025.08.007.
[3]赵祥模,童星,穆柯楠,等.面向自动驾驶汽车测试需求的关键场景要素提取方法[J/OL].中国公路学报,1-15[2025-05-14].http://kns.cnki.net/kcms/detail/61.1313.U.20250418.1427.006.html.
.jpg)
.jpg)
.jpg)
.jpg)