.jpg)
面向农业车联网的果蔬自动采摘无人车的开发与设计

杨思远 张昊喆 叶灵熙
无锡学院
一、引言
目前果蔬采摘工作仍以人工为主,劳动力成本较高且效率偏低。因此,果蔬自动采摘机器人的开发已成为智慧农业研究的一个重要方向 [1]。现有果蔬采摘机器人面临多重技术瓶颈 [2]。在复杂农田环境中,枝叶遮挡和果实密集分布导致基于传统 YOLO 算法的目标识别精度不足,影响采摘成功率。单机负载极限限制设备移动效率,难以满足大规模作业需求 [3]。末端执行器适应性差,易造成果实损伤,无法适应多品类果实采摘。为此,本文以番茄为研究对象,设计了一种基于改进 YOLOv5 算法的无人采摘系统,通过双目视觉定位、激光SLAM 导航及自适应机械臂控制,实现高精度目标识别和主从机器人协同作业,为设施农业智能化提供高效、低损的解决方案。
二、系统总体设计
系统采用主从协同架构,采摘主车搭载机械臂和视觉模块,负责果实识别与采摘,收集从车配备收集框和导航系统,实现果实运输。采收系统结构图如图 1 所示。两车通过 ROS(Robot Operating System)协同控制,基于 Topic 通信机制分配任务。整体工作流程通过高精度摄像头和激光雷达采集数据,改进的YOLOv5 算法识别果实并使用双目视觉测距定位,通过激光 SLAM 构建地图引导主从编队移动,末端执行器完成采摘,收集筐压力传感器触发返航指令。路由器和交换机进行实时数据传输与远程监控实现车联网通信,车联网架构整合边缘计算模块,提升响应速度和可靠性。
三、关键技术实现
3.1 改进 YOLOv5 目标识别算法
基于实时性和快速性的需求,我们选用了 YOLOv5 算法进行目标识别定位。该算法是单阶段检测器中的一种方法,通过一次向前传播即可完成目标检测[4]。他将图像划分为网格,并预测每个网格内物体的种类和位置信息,然后根据 IoU 值进行目标框的筛选,输出最终结果。本研究将 CIoU 损失函数替换为EIoU 损失函数,并使用 DIoU-NMS 进行极大值抑制,可以提高 YOLOv5 模型在实际应用中的准确性和鲁棒性,使其更加适合于番茄生长状态不一和摄像过程中枝叶遮挡等复杂场景下的目标检测任务。
3.2 双目视觉测距
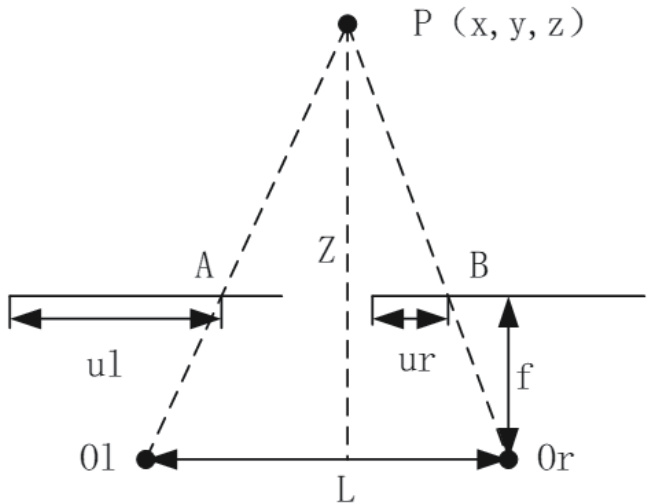
目前,视觉测距方法主要包括单目和双目两种。单目测距存在误差大、精度低等问题,而双目测距则通过左右图像形成视差图,利用三角测量原理计算距离,更直观、准确。双目测距系统包括相机标定、立体矫正、立体匹配和测距计算四个步骤,其中相机标定解决光学透镜特性导致的成像问题,立体校正消除畸变,立体匹配获取视差,从而计算深度信息。双目测距采用的几何原理其二维平面,如图2 所示。
图1 双目测距几何原理图
3.3 采摘收集主从车自主导航系统
在整个系统中,采摘主车和收集从车都有激光 SLAM 自主导航系统,使用激光雷达、里程计和 IMU 传感器数据融合实现自动导航。通过匹配点云和里程数据获取车辆位姿和地图数据,然后通过回环检测将部分地图数据融合为整体地图。导航的前提是移动机器人的环境感知技术,包括环境感知、地图创建、自主定位和运动规划等过程。利用多机器人编队思想实现采摘机器人和收集机器人的协同跟随,通过SLAM 建图、位置坐标广播和运动控制实现跟随系统。
3.4 末端执行器重构
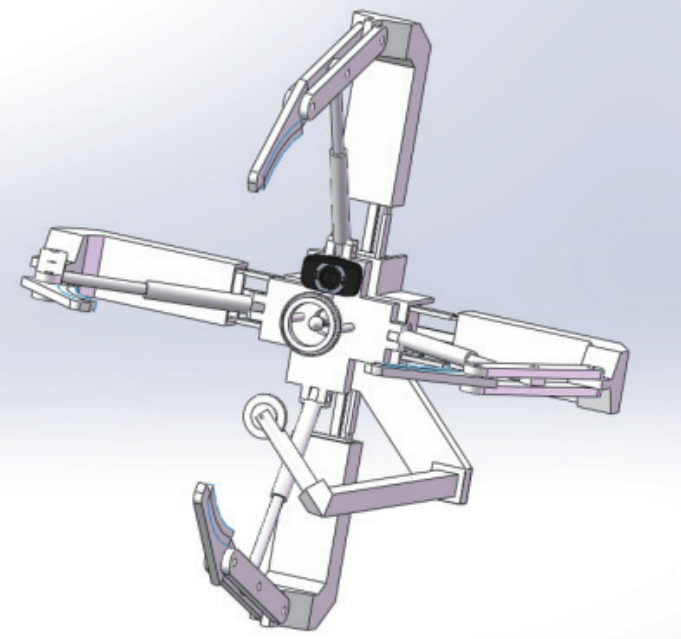
本研究设计的农业采摘机器人末端执行器和其控制电路如图 4 所示,包括执行壳体、爪肩、爪指、前连接板、气流装置、摄像和剪切部分。爪肩有四条对称部分,通过伸缩杆连接执行壳体,用于适应不同农作物大小。前连接板通过伸缩杆控制四根爪指合拢。气流装置连接气泵,用于果实吸附和分离。爪肩伸缩和摄像满足不同农作物需求,气囊和剪切装置减少采摘损伤。指尖有压力传感器,当距离收集框达预设高度时,夹爪张开,气泵关闭,果实落入框中。
图2 自适应四指夹爪结构图
四、结论与展望
本研究针对设施农业中果蔬采摘自动化程度低、识别精度不足及多机协同效率低等问题,提出一套基于农业车联网的自动采摘无人车系统。通过采用EIoU 损失函数与 DIoU-NMS 抑制策略改进 YOLOv5 算法,这枝叶遮挡和果实密集的情况下显著提升番茄识别精度,降低漏检率。融合基于三角测量原理获取深度信息的双目视觉测距技术与激光 SLAM 导航系统,实现精准定位,并依托多机器人编队控制使运输效率提升 40%, 。创新设计自适应四指夹爪末端执行器,集成爪肩伸缩机构、气流吸附装置及指尖压力传感模块,支持 30-80mm 果实直径动态调整,降低采摘损伤率。基于ROS 的Topic 通信机制构架车联网架构,整合边缘计算模块降低延迟,为大规模设施农业提供高可靠性协同解决方案。该系统在番茄温室实测中验证了技术可行性,未来将拓展多作物兼容性与集群智能调度优化。
参考文献
[1] 杨国亮, 盛杨杨, 洪鑫芳, 等. 改进YOLOv8 的果园番茄目标检测算法[J].计算机工程应用 ,2024.DOI:10.3778/j.issn.1002-8331.2406-0132
[2] 李丽,梁继元,张云峰,等 . 基于改进 YOLOv5 的复杂环境下柑橘目标精准检测与定位方法 [J]. 农业机械学报 ,2024,55(8):280-290.DOI:10.6041/j.issn.1000-1298.2024.08.025
[3] 李兴旭,陈雯柏,王一群,等 . 基于级联视觉检测的樱桃番茄自动采 收 系 统 设 计 与 实 验 [J]. 农 业 工 程 学 报 ,2023,39(1):136-145.DOI:10.11975/j.issn.1002-6819.202210099
[4] 张永宏 , 李宇超 , 秦夏洋 , 等 . 非结构化环境下番茄采摘机器人目标识别与检测 [J]. 中国农机化学报 ,2024,45(4):205-213.DOI:10.13733/j.jcam.issn.2095-5553.2024.04.030
(江苏省 2024 年大学生创新训练计划项目 202413982039Y)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)