.jpg)
动力机械手关键部件的优化改进研究

赵亮1
中核四○四有限公司 甘肃兰州 732850
Abstract: Some operations with high radioactivity levels, it is necessary to disassemble and transfer the relevant equipment through the remote operation of the manipulator in the reheating room, to reduce the radiation dose; Power manipulator is the key equipment of remote operation, in order to reduce the failure rate, its structure must be stable and reliable, easy to maintain. This paper mainly combined with the factory test and engineering application of the power manipulator in a hot chamber, optimized and improved the key components and structure of the power manipulator, proposed the methods of modular structure optimization, radiation resistance optimization and double motor structure optimization, through the optimization and improvement of the power manipulator, the failure rate of the power manipulator is reduced, and the reliability of the power manipulator is improved.
Key words: hot cell; power manipulator; optimization and improvement
前言
部分放射性水平较高的区域需要远距离操作和维修,工作人员在热室前区,通过屏蔽窗、热室摄像系统观察,利用热室吊车、动力手、转运设备间接的,或利用主从机械手直接操作位于高剂量热室内的部件。
动力机械手相比传统机械手,其操作范围大、操作负荷大。适用于放射性水平较高的大型热室、反应堆大厅等大负荷的远距离遥控操作。它可以在有辐射或人类无法亲临现场的环境中,通过远程控制和视频系统完成对目标部件的检查、装配、拆卸、焊接、运输、去污、储存、修复、分解等操作,具有远程操作、覆盖范围大、柔性强、操作灵活、作用力大、抗辐射等特点。
传统的动力机械手结构简单,在使用频繁的情况下,容易发生故障,且维修复杂。本文通过对动力机械手关键部件进行了优化改进,提高了动力机械手稳定性,为同类工程设备提供参考。
1 动力机械手主要结构
动力机械手主要是由动力手臂、大小车及驱动装置、伸缩筒系统、摄像系统、电缆及其贯穿件(包括防护塞及防护塞预埋件)、运行轨道、应急回收系统、更换装置和操作工具、控制系统(安全限位)等部分组成。如图1 所示:
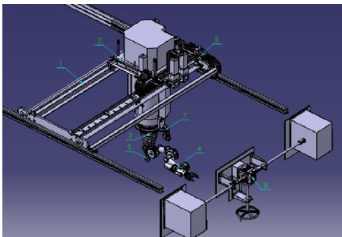
1- 大车、2- 小车、3- 伸缩筒系统、4- 动力手臂系统、5- 吊钩、6- 电气/ 控制系统、7- 云台摄像系统、8- 应急回收系统
图1 动力机械手示意图
2 动力机械手关键部件优化改进
2.1 动力手臂模块化结构改进
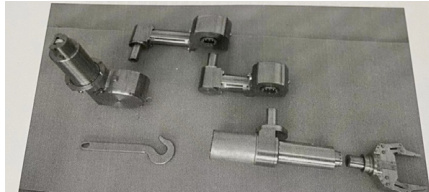
传统的动力机械手检修拆装十分麻烦,为了满足现场对动力手臂的运动要求,又能实现快速拆装功能,对动力机械手臂进行改进,采用模块化结构,可整体拆卸。通过远程操作可将其解体为数个部件,使机械手臂的每一个模块单元都可以通过拆卸一个螺栓,轻松实现拆卸。配合专用工装的使用,可以轻松拆卸机械手臂上的各单元,每一个部件的拆卸,无需其他电气方面的额外连接。
动力手臂具有多个关节,设置必要的旋转自由度。腕关节可做伸缩运动。配备夹钳、可以实现所需的抓取、夹持操作,并能使用夹钳夹持其他工具进行操作。夹钳安装在腕关节处,可实现开启、闭合、旋转功能。如图2 所示:
2.2 伸缩系统改进
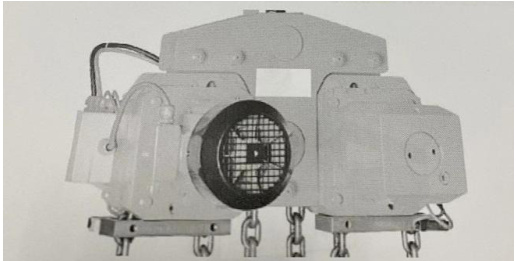
为了保证可靠性,动力机械手伸缩系统采用双电动葫芦驱动。采用两只 5t 电动葫芦集成在一个支架上,共用一套链条,其中任何一支葫芦发生故障都不会影响另一只葫芦的运行,以达到伸缩系统的双备份要求。
伸缩系统设置高精度机械式拉线传感器,不仅可以在操作系统显示屏上显示绝对位置,还可以为系统提供超程反馈,提高安全性能。
此外,配备重力反馈传感器,称重系统安装在支撑板上,分为单点称重和四角称重,采用 HBM 的称重传感器进行连接,此传感器既可以承受拉力又可以承受压力,单点称重时,动力机械手的所有重力都作用在一个传感器上,除了可以精确称重外,还可以在伸缩筒触底时,发出异常信号,以达到安全的目的。四角称重会实时监控动力手臂的工作状态,一般情况下,四个传感器的重量偏差不大,并且呈一定的规律,如果发生碰撞情况,四个传感器的重量会不均衡,输出数值异常,系统会立即停机,以达到安全的目的。
2.3 摄像系统改进
原有的摄像系统画面不清晰,且故障率高,维修不便。改进后的动力机械手共设有 2 套摄像系统,第 1 套是位于固定管上的云台变焦摄像机,摄像机的基座可以绕固定管旋转。摄像机整体耐辐照,云台系统的数据线从小行车下伸出,可以通过维修室顶部的维修口来进行远距离更换。此摄像头为云台变焦摄像头,配备具有双向电动云台,方便摄像头旋转观察。该云台可绕垂直方向360°旋转,俯仰 220∘ 。
2.4 密封结构优化
为保证热室气溶胶不外溢,动力机械手贯穿件采用静密封的设计,可达到密封和屏蔽的优化,贯穿件在屏蔽塞内,屏蔽塞设有密封垫,优化其密封性能。
动力机械手设置一套手摇的应急回收系统,钢丝绳穿出热室,为保证热室的密封性,需在手摇装置及卷筒外增加护罩及密封垫,保证入热室气溶胶不外泄。
2.5 双电机结构优化
动力机械手各驱动装置均采用双电机优化设计,以保证动力机械手在运行过程中出现电气故障,切换至备用电机,保证有物料的情况下设备能够平稳、安全有效的运行至维修区进行维修。
3 结论
经现场人员进行零部件加工和组装,顺利完成了动力机械手改造任务。经过空载、静载、动载调试验证,改进后的动力机械手各项参数满足试验要求,优化改造后的机械手投入使用后,运行稳定,故障率低,运行灵活。
本文通过对动力机械手关键部件结构进行改进优化,使动力机械手便于拆装,更换方便,同时也提高了设备的稳定性,通过对密封结构进行优化,耐辐射优化及双电机结构优化,提高了动力机械手可靠性,为今后同类设备提供了宝贵经验。
参考文献
[1] 胡国辉. 远距离操作工具核用机械手简介[A].中国核学会核化工分会. 中国核学会核化工分会成立三十周年庆祝大会暨全国核化工学术交流年会会议论文集[C]. 中国核学会核化工分会,2010.5
[2] 濮良贵 , 纪名刚 , 机械设计 [M]. 高等教育出版社 ,2006.
[3] 机械工程手册编委会 , 机械工程手册 [M]. 机械工业出版社 ,1995.
[4] 成大先 , 机械设计手册 [M]. 化学工业出版社 ,2000.
[5] 屏蔽墙后用远程操作装置 第 8 部分:动力机械手 DIN 25904-2015.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)