.jpg)
农机与无人机协同作业的智能路径规划方法探索

涂筱第 康景铭
重庆市涪陵区农业农村委员会 408000
引言
农机和无人机协同作业是智能农业中的一个重要应用领域,核心是高效、协调的路径规划能力。单一作业路径已经很难适应多任务,高密度农业场景的工作要求,所以构建多智能体协同规划模型就显得至关重要。现有的路径算法大多限于静态规划或者单智能体的优化问题,缺少动态避障和实时协调机制。本研究以融合式算法为基础进行路径模型设计,并将空间建图和分区策略相结合,系统性地探索适合真实田间场景下的智能路径规划方法,并且以提高协同作业效率和智能化水平为目标,对其性能表现进行模拟和实地验证。
一、协同作业背景与路径规划需求分析(一)农机与无人机协同作业的现实意义
传统农机虽然在智能农业的推进中高效,但是其空中监测和精细化作业存在不足。无人机具有低空覆盖和高机动性等优点,能和农机组成空地协同系统促进资源利用和作业效率的提高 。在大田植保实践中,通过农机的播撒和无人机的施药监测,整体的工作效率得到超过30%的提升。协同作业也减少资源的浪费和人力的投入,适合农时紧和地形复杂的情况。随着5G 和北斗技术的成熟,空地协同控制已具备可行性,并为路径规划的实现提供技术支持。
(二)协同路径规划的挑战与需求
农机和无人机的协同路径规划需综合考虑个体效率和系统的协同性。传统的路径规划因二者运动模型相差较大而很难应用;农机路径缓慢而固定,无人机机动灵活但容易失去 田间地形的复杂性和障碍的动态变化决定路径规划具有实时调整能力。为避免重复作业和碰撞,需构建高精的地图和统一的坐标系来支持区域划分和任务的平衡分配。
(三)现有路径规划方法分析及其局限
目前常见的路径规划算法有A*,Dijkstra 和RRT;智能优化类算法有遗传算法和蚁群算法,这些算法对单体作业具有较好的性能,但是并不适合于复杂的协同场景。A*路径虽然是最优的,但其动态避障性能并不理想;
而RRT 虽然适用于非结构环境,但其稳定性较差,因此需进一步的优化处理。智能优化算法具有全局搜索的能力,但是收敛速度较慢,对初始参数依赖性强,难以对变化做出实时响应。
二、智能路径规划技术模型设计(一)融合多智能体路径规划算法
考虑到农机与无人机的协同作业需求,本研究提出一种融合式多智能体路径规划模型。该模型以改进的协同A 算法为核心,结合局部D Lite 机制进行动态调整,并采用蚁群算法来实现路径的全局优化。该模型实现“空--大地”双智能体之间的路径共享和互动,有效地避免冲突和任务重叠。农机路径的目标是区域覆盖最优和无人机的最佳接入顺序及航程效率。仿真结果表明,该融合算法在路径优化、任务均衡与响应效率方面优于传统方法,显著提升多任务场景下作业效率与资源协调能力。
表1 农机与无人机路径规划算法对比仿真结果(单位: %)
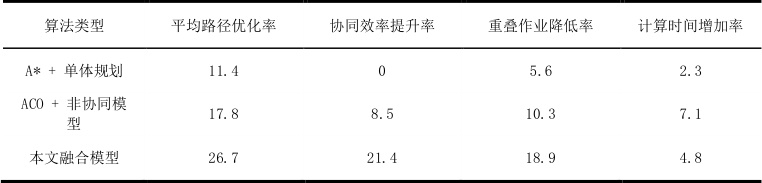
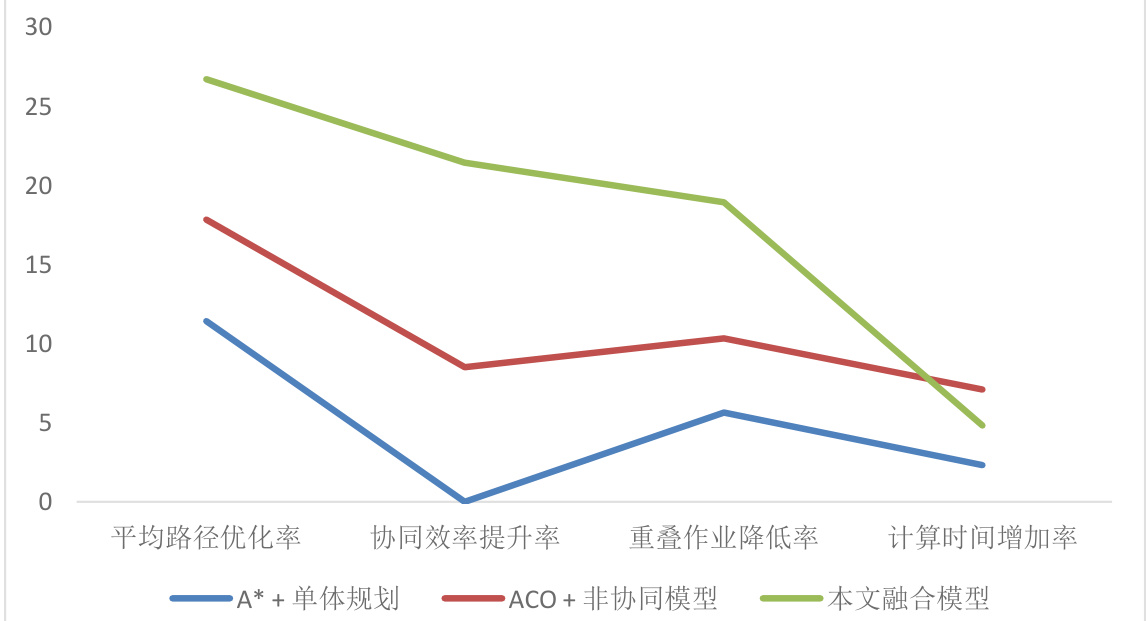
图1 农机与无人机路径规划算法对比仿真结果(二)空间建图与任务区域分配策略
为促进协同路径系统高效和稳定地运行,需构建高精度作业地图和建立合理任务区域划分机制。本研究将遥感影像和多源地形数据进行整合,制作高分辨率DEM 和植被图,并联合GPS 和RTK 技术实现厘米级的建图精度。先利用K-means 算法进行作业点的聚类,然后根据Voronoi 图进行区域边界的自动圈定,以避免路径重叠和资源干扰。试验结果表明:所提方法能实现多地块复杂地形条件下作业任务均衡划分和路径优化,且系统具有较好的总体稳定性。
(三)动态避障与实时路径修正机制
在复杂的田间环境下,农机和无人机往往会遇到突发障碍,路径系统需具有实时感知和路径修正能力。本研究搭建视觉 SLAM 和激光雷达的融合感知体系来实时产生局部环境模型并结合一种改进的优先级图搜索算法进行路径的快速重建[2]。结合5G 通信和北斗高精度定位技术实现空地节点的状态同步和快速反应。模拟结果表明,在遭遇突发障碍物的情况下,系统能在 1.2 秒内完成路径的更新,将误差控制在±5cm 范围内,确保作业的连续性和安全性。
三、仿真验证与实地测试结果分析(一)仿真平台构建与算法效果验证
为验证协同路径模型,本研究以 ROS 和 Gazebo 构建仿真平台对农田空地协同作业环境进行仿真,并将路径规划,避障识别和通信等模块进行整合。该平台介绍农机模型、四旋翼模型和传感器系统等,方便对不同算法的性能进行评价。仿真结果表明,所提出的融合算法具有作业连贯性,路径平滑性和响应延迟等优越的性能,特别是在具有复杂障碍的场景中表现出较好的稳定性。
表2 各算法在仿真平台中的关键性能指标对比


(二)实地测试场景与数据采集
为验证该算法在现场的适用性,本研究在重庆市选取48 亩玉米田作为试验场景,搭建农机与无人机协同系统完成施肥、喷洒及巡检等作业。农机配备 RTK 模块,无人机搭载多光谱及图传设备,实现高精度同步作业。在为期五天的连续测试过程中,系统采集了关键路径与任务数据[3]。结果显示,该协同系统显著减少了重复作业,提升了作业效率与作业均匀性。
(三)算法适应性与可扩展性分析
采用变量控制实验,评价该算法对各种地形和任务强度的适应性。经过实验验证,该模型能支持最多 10 组的农机与无人机的协同工作,其路径重构在2 秒之内保持稳定,并展现出出色的并行处理性能。在连接固定翼、多旋翼和各种作业工具等场景下,该系统都能保持高度兼容性。在高密度作业和复杂的边界条件下,路径的优化率仍然能维持在20%以上,性能的下降是能控制的。
结论
本研究所提智能路径规划方法在多智能体协同建模,动态避障机制和任务区域优化等方面显著提高农机和无人机协同作业效率。模拟的数据显示,这种方法在路径的优化上增加 26.7%,并且在作业的连续性和任务的响应能力上明显胜过其他比较的算法。通过实地测试,进一步证明该方法在复杂环境下的稳定性和实际应用价值。本研究在路径控制策略和平台级支持上对农业智能装备系统具有可行性,有较好的推广应用潜力,今后能进一步推广到更多农业无人系统集群作业环境。
参考文献
[1] 马黎 崔雅博.植保无人机群协同作业的路径规划与控制方法[J].中国农机化学报, 2025, 46(4):139-145.
[2] 徐金华,汪飞,韩飞,等.一种多车辆协同多植保无人机作业路径规划方法[J].东北大学学报(自然科学版),2024, 45(2):296-304.
[3] 樊家晖,窦银科,寇立伟,等.极地无人机-车协同定位算法研究[J].计算机仿真, 2024, 41(10):254-259.
.jpg)
.jpg)
.jpg)