.jpg)
爬楼梯轮椅的嵌入式控制系统研究

刘刚
内蒙古机电职业技术学院 010070
1 系统设计概述
1.1 系统功能需求
爬楼梯轮椅作为一种面向特殊人群的智能出行辅助设备,其设计必须兼顾安全性、稳定性、实用性与智能化。针对实际应用场景系统需具备以下核心功能:首先,应实现对楼梯环境的实时检测与识别。其次,系统必须具备稳定的运动控制能力。在执行上下楼梯动作时系统需能够协调控制多个执行机构,实现平稳的姿态调整与连续动作,保障用户在整个过程中的身体稳定与安全。最后,系统应具备故障检测与紧急保护机制,当传感器检测异常、姿态失衡或执行失败时系统应及时停止运行并发出警报,最大程度保障用户的生命安全。
1.2 系统总体结构
本系统采用模块化设计理念,整体结构主要由嵌入式控制单元、传感器感知模块、执行机构、驱动模块、人机交互模块以及电源管理模块六大部分构成。嵌入式控制单元为系统的核心,负责处理各类传感数据、执行控制算法并协调轮椅的运动逻辑。传感器模块主要用于获取楼梯边缘、台阶高度、轮椅姿态等环境与状态信息,包括超声波传感器、红外测距模块、陀螺仪与加速度计等。执行机构部分主要包括履带驱动机构、支撑轮组件及升降结构,用于实现楼梯攀爬、姿态调整与稳定控制。驱动模块为各执行机构提供电能和功率控制,同时支持正反转与速度调节。人机交互模块允许用户通过按钮、触控屏或语音指令操作轮椅,实时获取系统状态信息。电源管理模块负责整机供电并保障系统在运行过程中的电压、电流稳定,支持应急断电与报警功能。
2 硬件部分设计
2.1 控制器选择
嵌入式控制器是爬楼梯轮椅系统的核心部件,负责采集传感器数据、执行控制算法、调度执行机构及实现人机交互等功能,因此控制器的选型需综合考虑其运算能力、I/O 接口数量、功耗控制、扩展性以及稳定性等因素,在本系统中选用 STM32 系列的 Cortex-M4 内核微控制器,型号为 STM32F407VG,该芯片具备较高的主频(168MHz)、丰富的外设接口(如USART、I2C、SPI、PWM、ADC 等),能够满足系统对数据处理与多模块协调控制的需求。STM32F407 具备较强的实时处理能力和中断响应速度,有助于实现楼梯识别、姿态调整等关键功能的快速反应。其集成的浮点运算单元能够有效提升控制算法执行效率,尤其适用于复杂的控制逻辑计算,如 PID 调节与滤波算法。综合考虑性能、资源配置和开发便利性,STM32F407 是一种性价比较高且适用于复杂嵌入式控制系统的理想选择。
2.2 传感器模块
传感器模块是实现爬楼梯轮椅智能化感知功能的关键组成部分,主要负责环境信息采集与轮椅姿态监测,为嵌入式控制系统提供实时、准确的数据支持,根据系统功能需求本设计采用多种类型的传感器进行集成,包括环境检测类与姿态检测类两大类。在环境感知方面,选用超声波传感器和红外测距模块用于检测楼梯的存在及其几何特征,如高度、宽度与深度等。通过前置与底部多点布置,传感器能够实现对楼梯边缘与台阶的精准识别辅助判断是否具备爬升条件,光电传感器用于检测楼梯起始点与终止点,辅助控制逻辑的自动切换。在姿态监测方面,系统集成了三轴陀螺仪与加速度计,用于监测轮椅在运动过程中的倾斜角度与加速度变化,从而实现实时的姿态调整与稳定控制。
2.3 执行机构与驱动电路
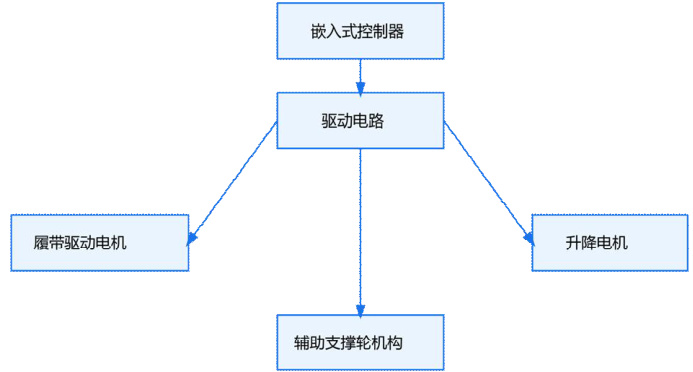
执行机构是爬楼梯轮椅实现上下楼功能的直接动力来源,主要包括履带驱动机构、支撑轮组件、升降机构等,履带机构采用高扭矩直流电机作为驱动源,配合减速齿轮箱,提高轮椅在楼梯面上的附着力与推进力,确保在爬升过程中具备足够的牵引能力与爬坡角度。履带材质选用高摩擦耐磨橡胶,增强与地面的接触稳定性,升降机构则用于调整座椅的俯仰角与整体高度,适应不同楼梯坡度及用户姿态平衡的需要,通过电动推杆或丝杆升降结构控制座椅支架,实现稳定、缓慢且可控的姿态过渡,在轮椅停止或转向过程中,辅助支撑轮组件可展开以提升整体结构的稳定性,驱动电路部分主要采用 H 桥电机驱动芯片(如 L298N 或 TB6612FNG)控制直流电机的启停、转向及转速调节。PWM 信号由嵌入式控制器输出,经驱动芯片调制后控制电机的精细运行,此外系统设置电流检测与过载保护电路,可实时监控执行机构的工作状态,防止电机堵转、过热等异常现象发生,提升整体系统的安全性与可靠性。如图 1。
图 1:执行机构与驱动电路
3 软件部分设计
3.1 系统控制流程
爬楼梯轮椅的系统控制流程基于“感知—决策—执行”的基本架构,围绕嵌入式控制器协调各模块协同运行展开。在系统启动阶段控制器首先对各传感器进行初始化检测,确保传感器状态正常并开始实时采集数据,包括楼梯边缘检测、坡度判断和姿态角监测等信息。当系统识别到轮椅靠近楼梯区域,控制逻辑将自动切换至“楼梯模式”,控制器根据传感器输入判断楼梯的几何特征并启动对应的爬升动作,控制流程中嵌入多级判断机制,确保轮椅在动作执行过程中维持姿态平衡与运动稳定,履带驱动系统和升降机构由控制器发出 PWM 信号进行同步控制,实现轮椅向上或向下的平稳运动。同时系统控制流程支持用户输入指令优先级判断,如在爬楼过程中用户触发急停按钮,控制器将立即中断动作并锁定执行机构进入保护状态,系统运行期间控制器持续监控电机电流、传感器数据与姿态信息,并根据状态变化实时调整控制策略,确保轮椅安全高效运行。
3.2 主要控制算法
为了实现爬楼梯轮椅在复杂环境中的稳定运行与安全控制,系统设计了多种嵌入式控制算法,主要包括 PID 控制算法、姿态调节算法以及楼梯识别与路径判别算法。核心控制策略基于经典 PID 算法,通过对传感器采集到的倾角、位置、速度等参数进行闭环控制,实现电机的精确调速与轮椅姿态的动态稳定调整。在履带驱动控制中,PID 控制器根据当前轮椅前倾/后仰角度与设定值之间的偏差计算调节信号,调整电机输出功率,以维持轮椅在爬楼过程中的平衡状态,对于升降机构和辅助支撑轮的控制,系统结合状态机模型,依照阶段性动作流程执行高度调节与支撑展开,确保在楼梯每一级台阶上均能完成安全过渡。
结束语
本文围绕爬楼梯轮椅的嵌入式控制系统展开研究,设计并实现了包括控制器、传感器、执行机构与软件算法在内的完整系统架构,未来可进一步引入人工智能与远程通信技术,提升系统的智能化水平与适应能力。
参考文献
[1]赵志高.一种智能轮椅控制系统的设计与实现[J].电子技术应用,2021,47(6):112–115.
[2]呼民.基于 STM32 的多功能爬楼梯轮椅控制系统设计[J].机电工程,2020,37(4):89–93.
作者简介:刘刚,1978 年 10 月,男,汉族,辽宁,硕士研究生,讲师,机电一体化。
校级课题 课题名称:基于嵌入式的驾驶辅助爬楼梯轮椅控制系统设计与应用研究 课题编号:NJDZR2403
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)