.jpg)
基于树莓派的智能导盲眼镜的设计

罗云 苏梓豪
武汉设计工程学院智能工程学院 湖北武汉 430205
引言
全球视力障碍患者人数超过 2.8 亿,中国占比约 18% 。视觉障碍导致的出行不便存在安全隐患[1],且超过 92% 的盲人因出行困难而减少外出 [2],使得助盲成为重要的公共卫生与社会议题。保障该群体安全、有效的出行至关重要。为此,本文设计了一种基于树莓派的智能导盲眼镜。相较于传统导盲手段,该设备能够实时感知环境信息,精准锁定盲道位置,并利用图像处理技术提供精确导航指引。同时,集成语音播报系统实现了及时的人机交互[3]。
1 智能导盲眼镜系统的整体设计
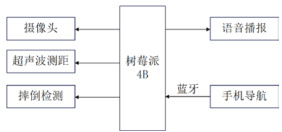
本系统采用树莓派 4B 作为核心控制器,构建了一套集环境感知导航提示与安全监护功能于一体的智能导盲眼镜。系统通过摄像头模块实时采集环境图像数据,并利用 OpenCV 库进行图像处理与分析,精准识别盲道特征,实时判断盲道相对于佩戴者的方位,并通过语音提供方位提示。同时系统配备超声波测距模块,持续监测前方障碍物距离,并在达到预设安全阈值时触发语音告警。为保障使用者安全,系统集成基于加速度传感器的跌倒检测模块,实时监测佩戴者姿态变化;当检测到加速度值超过预设跌倒判定阈值时,系统自动触发紧急求救语音播报。此外,系统内置蓝牙模块,可与用户手机连接,实现与手机导航应用进行交互,获取定位与路径规划服务。智能导盲眼镜的系统框图如图1 所示。
图1 智能导盲眼镜的系统框图
2 智能导盲眼镜系统的硬件设计
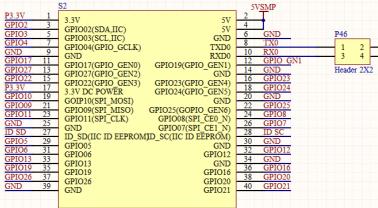
图2 主控模块电路设计
2.1 主控模块电路设计
树莓派 4B 搭载的 Broadcom BCM2711 主控芯片通过其 40 针 GPIO接口为智能导盲系统提供了强大的扩展能力 [4]。这组多功能引脚阵列包含 28 个可编程 GPIO、2 个 UART 串口、2 个 SPI 总线、2 个 I2C 总线以及4 路PWM 输出等丰富接口资源,支持3.3V TTL 电平标准。此外,引脚阵列还包含 5V/3.3V 电源输出(最大 1.2A)、8 个接地引脚以及CSI/DSI 专用接口,为连接超声波传感器、惯性测量单元、摄像头等外设提供了完整的硬件支持。如图2 为主控模块电路设计。
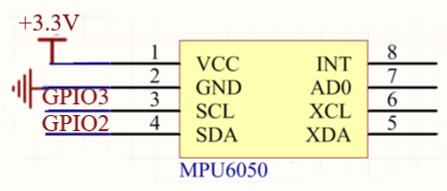
2.2 摔倒检测模块设计
在本系统中摔倒检测使用 MPU6050 芯片,采用 I2C 协议将主控与该芯片连接。SCL 接到 GPIO3 作为 I2C 协议的时钟引脚, SDA 接到 GPIO2 作为 I2C 协议的数据传输引脚,SCL 上升沿时,MPU6050锁存 SDA 数据。起始时,SCL 高电平时,SDA 从高到低跳变,当进行数据传输 SCL 低电平时树莓派放置在高位先行的数据位,SCL 高电平时 MPU6050 进行采样,SCL 高电平时,SDA 从低到高跳变停止,MPU6050 的电路图如图 3 所示。
3 盲道识别算法
本系统盲道识别采用基于 OpenCV 的多层次盲道识别算法,通过颜色空间转换、边缘增强、形态学处理和几何特征分析四个核心步骤实现盲道检测 [5]。国内盲道为与周围环境区分通常为黄色算法首先将采集的 BGR 图像转换到 HSV 色彩空间,利用黄色盲道在 HSV 空间的特征值范围(H ∈ [15,30],S ∈ [100,255],V ∈ [100,255])进行初步分割 [6]。盲道方位判断主要是通过计算盲道区域中心点与图像中心线的相对位置实现导航指引。
方位角误差计算公式为:

其中D 为检测距离, x 为横向偏移量。针对树莓派4B 的硬件限制,算法进行了图像降采样、ROI 区域限定、算法加速、多帧采样 4 个方面的优化。
4 智能导盲眼镜系统的软件设计
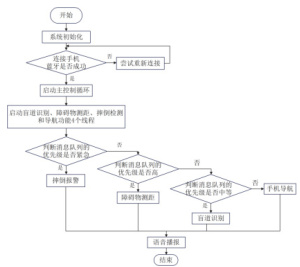
系统初始化后会判断是否进行蓝牙连接,如果没有连接成功会尝试重新去连接,连接成功后启动主控制循环,启动4 个线程的消息队列,判断消息队列的优先级来判断需要执行的功能,优先级依次是摔倒时进行语音播报,即将撞到障碍物时的语音播报,对盲道方位进行导航和障碍物距离播报,手机导航的语音播报。如图4 所示为系统整体流程图。
图4 系统整体软件流程图
5 系统测试结果与分析
该系统的整体硬件模块(树莓派 4B、HC-SR04、MPU6050、摄像头及语音模块)协同工作稳定,传感器数据实时采集与语音响应功能验证有效。进行了如下专项测试显示:
(1)盲道识别在 1-3 米范围内方位准确率 100% (响应时间 0.8-1.5 秒),但强光环境因 HSV 色彩饱和导致延迟增至 3.2 秒,且远距边缘模糊需优化分辨率自适应算法;
(2)障碍物检测在 5-10cm 距离播报误差 ⩽±0.5cm ,低于 5cm时碰撞告警触发率 100% ;
(3)防跌倒功能对模拟跌倒触发率达 100% ,但跑步场景因 20m/ s² 阈值兼容不足产生 60% 误报,下蹲动作亦存在误触发;
(4)导航功能室内外切换响应正确,室外指令播报延迟 ⩽1.2 秒。
6 结语
本系统集成了超声波测距、惯性传感器摔倒检测、计算机视觉盲道识别和智能语音播报四大核心功能,旨在为视障人士提供实时环境感知与导航辅助。该系统采用多线程并行架构,确保各传感器数据独立采集、高效处理,并通过优先级队列管理语音播报,避免信息冲突。盲道检测结合颜色、形状、纹理特征,减少误判。摔倒检测采用动态阈值,适应不同运动状态。本系统的盲人辅助系统已具备基础环境感知、避障和导航能力,适用于室内及短距离出行场景,为盲人出行提供了一种高效、智能的解决方案[7]。
参考文献
1. 胡娟 . 基于超声波与图像识别的盲人导航眼镜研究与实现 [D].电子科技大学 ,2016.
2. 姚佩岐 , 卢宇铭 . 基于包容性设计理念智能导盲眼镜设计与探究 [J]. 设计 , 2024, 37 (01): 8-11.
3. 徐晶晶 , 周旭 , 孔耀 . 基于树莓派 3B+ 与 OpenCV 的红枣外观品质自动分拣系统的研究 [J]. 现代信息科技 ,2023,7(16):138-142.
4. 许海 , 徐瑾 , 徐帅 . 基于 linux 系统的树莓派一系列开发 [J].电脑知识与技术 , 2018, 14 (08): 236-238.
5. 马佳越 , 段欣雨 . 基于树莓派的智能车牌识别系统设计 [J]. 智能物联技术 ,2024,56(03):124-127.
6. 宋昌伟 , 雷安华 , 程鑫鑫 , 等 . 基于树莓派的人脸识别校园管理系统设计 [J]. 微型电脑应用 , 2024, 40 (06): 17-20+24 .
7. 周卓锋, 吕世凯, 王思源, 等. 基于树莓派的智能导盲装置[J].山西电子技术 ,2024,(02):20-22.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)