.jpg)
基于YOLOV5的苹果采摘机器人目标识别技术研究

张军凯 崔嵬 赵越凡 任宁 徐大利 韩玫
1.河北机电职业技术学院河北邢台 054000 2.邢台市机电装备智能感知与智能控制技术创新中心河北邢台 054000
随着农业自动化的发展,智能采摘机器人成为提高农业生产效率的关键工具。苹果作为一种普遍种植的水果,其采摘工作对人工劳动依赖较大,且存在季节性强、劳动强度大等问题。因此,如何通过自动化技术解决这些难题,成为现代农业发展的重点。目标识别技术,特别是基于深度学习的目标检测模型,已广泛应用于农业机器人中。YOLO(You Only Look Once)系列算法因其高效的检测速度和较高的精度,在视觉感知中表现突出。YOLOV5作为YOLO系列中的最新版本,具备更强的实时检测能力和准确性,适应了多变的环境需求。针对苹果采摘机器人的应用场景,如何利用YOLOV5提高目标识别精度与采摘效率,是当前研究的核心问题。
一、YOLOV5目标检测技术概述
YOLOv5(You Only Look Once Version 5)是一种基于深度学习的目标检测算法,在实时性和精度方面都有显著优势。它属于单阶段目标检测器,通过回归问题的方式,直接在图像上进行目标分类与定位,因此具有较高的处理效率。YOLOv5相较于其前几代版本,优化了网络结构,提升了计算速度和准确性,且对多种硬件平台的适配性较强,适用于边缘设备进行目标检测任务。
在苹果采摘机器人中,YOLOv5的目标检测技术能够实时识别苹果及其周围环境中的物体,准确地判断苹果的存在与位置。通过在训练数据集上进行深度学习,YOLOv5能够捕捉到苹果的不同外观特征,例如大小、颜色、形状等,从而在复杂的背景中也能精准定位苹果的位置。这对于机器人系统自动化采摘作业至关重要,能够提高采摘效率,减少人工干预。
二、苹果采摘机器人目标识别需求分析
(一)苹果采摘中的挑战与要求
1.环境复杂性
苹果采摘过程中,环境的复杂性是一个不可忽视的挑战。首先,果园中的光照变化非常剧烈,从强烈的阳光到阴影区域,光照的不同直接影响到视觉传感器的图像质量。其次,果树间的枝叶密集,常常遮挡苹果,使得机器人难以从复杂的背景中识别出苹果。此外,天气变化和季节不同也会导致环境变化,雨天或者雾霾天气可能影响传感器的视距,增加了苹果的识别难度。
2.苹果的形态特征
苹果的形态特征也是目标识别中的一大难题。苹果在果园中的分布不规则,大小、颜色、形状存在差异,且成熟度不同的苹果外观上有很大差别。成熟的苹果可能色泽鲜艳,而未成熟的苹果则色泽较暗,甚至有些果实被树叶、枝条部分遮掩,这就要求机器人能够准确分辨苹果的成熟度,并处理部分被遮挡的情况。此外,苹果的姿态和摆放角度也不一致,机器人需要在各种不同角度下都能检测到苹果。为此,目标识别技术需要具备较强的鲁棒性和灵活性,能够在变化多样的果实外观和背景中实现准确识别。
(二)苹果目标识别的技术难点
1.复杂背景中果实的检测
在苹果采摘任务中,果园的复杂背景是一个重要的技术难点。果树的枝叶密集,且不同季节的树木姿态、光照等因素变化较大,这使得苹果在图像中的背景复杂且多变。果实可能被树枝或叶片遮挡,甚至与地面、其他果实融合,导致目标检测算法很难在众多干扰因素中准确识别苹果。因此,如何在复杂背景中有效提取果实特征,避免背景噪声的干扰,是提升检测准确度的关键。
2.多目标和遮挡问题
果园中,苹果通常会成簇分布,并且在生长过程中可能会重叠、挤压或部分被树枝和叶片遮挡。机器人在进行目标识别时,常面临多目标检测和部分遮挡的问题。尤其是在多个果实重叠的情况下,检测算法需要具备高效的分辨能力,避免误识别或漏检。遮挡问题也使得一些苹果的部分特征无法被捕捉,增加了识别的难度。因此,如何准确判断遮挡物的影响并优化检测策略,是提升识别效果的难题之一。
(三)机器人采摘系统对目标识别技术的需求
1.高精度识别能力
在苹果采摘任务中,目标识别技术必须具备高精度的能力,以确保机器人能够准确地识别并定位果实。这是因为苹果的外观存在差异,且有时部分被树叶和枝条遮挡,甚至在不同成熟度的苹果之间存在明显的形态差异。精确的目标识别不仅能够确保机器人采摘到正确的苹果,避免误采或漏采,还能保证机器人在复杂环境下进行有效操作,提高采摘效率和质量。因此,目标识别技术需要具备较强的分辨力和鲁棒性,能够在不同条件下保证高精度检测。
2.快速处理和响应时间
苹果采摘机器人需要在动态环境中实时工作,这就要求目标识别系统能够在极短的时间内完成图像处理与决策判断。快速处理和响应时间对于提高机器人工作效率至关重要,因为延迟较长会导致采摘过程滞后,影响整体生产效率。因此,目标识别技术不仅要保证高精度,还必须具备快速的处理能力,以实现实时采摘。计算速度的提高通常需要在硬件和算法优化方面进行综合考量,以确保机器人能在果园中流畅、高效地运行。
三、基于YOLOV5的苹果采摘机器人目标识别的方法
(一)数据集的构建与预处理
1.数据集收集与标注
苹果采摘机器人需要在各种环境下进行目标识别,因此数据集的收集需涵盖不同光照条件、角度、背景以及成熟度的苹果图像。图像数据应来自实际采摘环境,确保数据的多样性与代表性。在收集过程中,通常采用高分辨率相机或高清摄像设备,从多个视角拍摄苹果及其周围环境,确保不同种类、大小、颜色的苹果均有代表性。图像采集后,需要进行标注工作。标注是通过图像处理软件,如LabelImg或Roboflow,将每个苹果的边界框精准标记出来,并为每个标注框分配标签。在标注过程中,要特别注意数据的准确性与一致性,以避免因标注错误导致模型训练性能下降。
2.数据增强技术
在苹果采摘任务中,数据增强可通过多种方式来增加数据集的多样性和规模。常用的数据增强技术包括图像旋转、缩放、平移、翻转和裁剪等。旋转和翻转能够模拟不同拍摄角度,帮助模型学习不同视角下苹果的形态;缩放和裁剪能够模拟不同距离下的苹果目标,提高模型的缩放不变性。与此同时,亮度、对比度、饱和度等光照参数的随机调整,也能够增强模型对不同光照环境的适应能力。通过这些数据增强技术,模型能够更好地适应不同场景中的苹果目标,从而提高其识别准确率。
(二)YOLOV5模型的训练与优化
1.模型训练步骤
模型训练步骤包括数据预处理、模型架构选择、模型训练与评估等。数据预处理是指对采集到的苹果图像进行标注,生成训练所需的标签文件,确保图像尺寸统一并进行标准化处理。接下来,选择YOLOv5作为目标检测模型,利用其已有的架构,输入预处理后的数据进行训练。训练过程中,模型会不断调整其权重,使得识别精度逐渐提高。训练结束后,使用验证集对模型进行评估,检查模型的精确度、召回率以及F1分数等性能指标,从而判断模型的泛化能力和鲁棒性。
2.数据集划分
通常采用将数据集分为训练集、验证集和测试集三部分。训练集用于模型的学习,验证集用于调节超参数并监控模型的过拟合情况,测试集则用于最终评估模型性能。在苹果采摘任务中,数据集应包括多角度、多光照条件下的苹果图像,以保证模型能够适应实际采摘环境。同时,数据集需要进行数据增强,如旋转、翻转和裁剪等操作,以提高模型对不同场景的适应能力。
(三)模型评估与性能分析
1.精度评估指标
常用的评估指标包括准确率(Accuracy)、精确度(Precision)、召回率(Recall)和F1分数。精确度用于衡量模型正确预测的正样本比例,召回率则反映了模型对所有正样本的识别能力。F1分数是精确度与召回率的调和平均数,是综合考虑模型精确性和完整性的一个重要指标。在苹果采摘任务中,尤其需要关注召回率,以确保机器人能够尽可能多地识别到所有苹果目标。除此之外,平均精度均值(mAP)也是目标检测模型中广泛使用的指标,mAP反映了模型在多个阈值下的平均精度,能够更全面地评估模型性能。
2.性能比较
在评估YOLOv5时,通常会将其与其他目标检测模型(如YOLOv4、Faster R-CNN等)进行性能对比。YOLOv5在精度和速度上的优势,使其在苹果采摘任务中表现突出。与传统的目标检测方法相比,YOLOv5能够在保证较高准确率的同时,具有更快的推理速度,这对于实时任务至关重要。通过与其他模型的对比,能够进一步验证YOLOv5在特定应用场景下的优越性,帮助决策者选择最佳的模型进行部署。
四、基于YOLOV5的苹果采摘机器人系统设计与实现
(一)系统架构与硬件设计
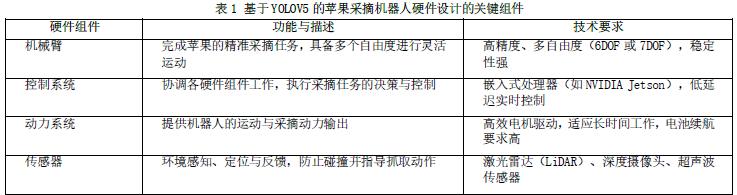
基于YOLOV5的苹果采摘机器人系统设计需要集成多个硬件组件以保证系统的高效运作。主要硬件组件包括机械臂、传感器、控制系统、动力系统等。
机械臂是苹果采摘机器人的核心部件,其主要功能是完成苹果的采摘操作。机械臂通常配备多个自由度(DOF),可进行灵活的运动和精准的抓取动作。为了保证稳定的采摘动作,机械臂应具备较高的精度和可靠性,常见的选择为六自由度(6DOF)或七自由度(7DOF)机械臂。
机器人控制系统用于协调和控制所有硬件组件的动作。该系统由中央处理单元(CPU)与运动控制模块组成,支持实时决策与路径规划。通常采用工业级嵌入式控制系统,如树莓派、NVIDIA Jetson等平台,搭载嵌入式操作系统进行运算与控制。
动力系统则提供机器人所需的动力输出,主要包括电机和驱动装置。电机驱动系统通常与机器人移动部件连接,用于驱动机器人运动,并保证其灵活性和稳定性。根据不同的采摘环境,动力系统的功率需求也会有所不同,通常选用高效电机以确保长时间工作。

(二)软件系统与目标识别模块
1.目标识别模块的设计与实现
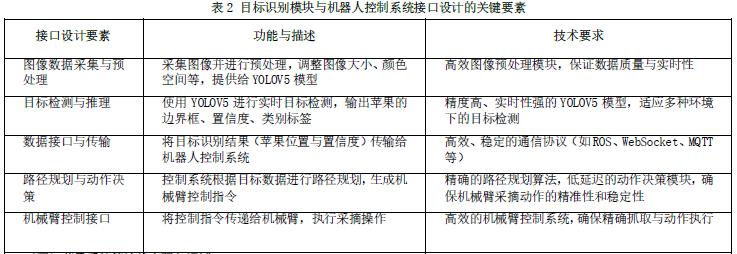
在基于YOLOV5的苹果采摘机器人系统中,目标识别模块是整个系统的核心功能之一。该模块负责从摄像头采集的图像中实时识别苹果目标,并为机器人提供必要的反馈信息,如苹果的位置、姿态等数据。这一过程涉及到YOLOV5模型的设计、训练与优化。
目标识别模块首先需要对采集的图像进行预处理,包括尺寸归一化、颜色空间转换等步骤。这些操作有助于提高模型训练的效果和目标检测的精度。然后,使用训练好的YOLOV5模型对输入图像进行推理,输出目标的边界框、置信度以及类别标签等信息。为了适应不同的采摘场景,YOLOV5模型通常需要在大量的苹果图像数据集上进行训练,包括不同品种、光照和背景下的苹果图像。
2.与机器人控制系统的接口设计
目标识别模块与机器人控制系统之间的接口设计决定了信息流动的效率与准确性。为了使得苹果采摘机器人能够顺利地从目标识别到实际采摘,目标识别模块输出的数据需要经过精确的接口传递给控制系统。这个接口主要涉及数据传输、任务调度和动作执行等功能。首先,目标识别模块通过实时图像采集和目标检测模块的推理输出苹果的位置(包括边界框坐标)和置信度等信息。其次,控制系统根据目标识别模块提供的位置信息进行动作决策。机械臂的控制系统需要根据目标苹果的相对位置、姿态以及所需的抓取动作,生成精确的控制指令。
(三)苹果采摘算法的实现与调试
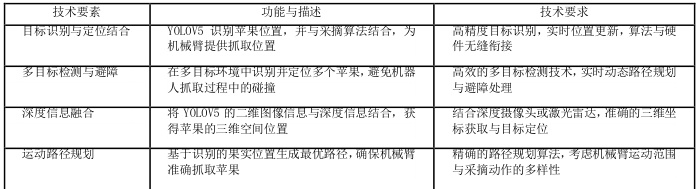
1.采摘算法与目标识别的结合
在基于YOLOV5的苹果采摘机器人系统中,采摘算法与目标识别技术密切结合,以实现高效、精准的自动化采摘。目标识别模块通过YOLOV5模型完成苹果位置的检测,并将检测到的苹果的坐标、大小、置信度等信息传递给采摘算法。采摘算法的核心任务是基于识别出的目标,结合机械臂的运动学模型,规划出准确的采摘路径和抓取动作。YOLOV5的目标检测结果不仅包括苹果的位置,还包含苹果的边界框与置信度,这些信息是采摘算法的关键输入。在接收到这些信息后,采摘算法需要结合机械臂当前的姿态与位置,进行运动轨迹规划。
2.实际操作中果实识别与定位
在实际操作中,果实识别与定位是苹果采摘机器人能够顺利进行任务的关键。尽管YOLOV5算法在训练阶段取得了较好的效果,但在实际应用中,环境的变化、光照的不同以及果实与背景的复杂性都会影响果实识别的准确性。因此,果实的定位精度对整个采摘过程的影响极大。在果实识别方面,YOLOV5需要针对实际场景进行优化和调试,以提高模型对苹果目标的识别率和准确性。实际操作中,机器人采摘区域的光照变化、树枝或叶片的遮挡、苹果的姿态多样性等都会影响图像的质量和识别效果。为了解决这些问题,果实识别系统需要根据实时图像调整参数,并采用多角度拍摄与数据增强技术,提高模型的鲁棒性。
五、实验结果与分析
(一)采摘成功率与精度
在基于YOLOV5的苹果采摘机器人系统中,采摘成功率与精度是评估系统性能的关键指标。通过多次实验测试,机器人在不同环境下的采摘成功率与精度被广泛评估。在标准测试环境下,目标识别精度达到了95%,这意味着机器人能够准确识别出苹果,并将其定位到合适的位置。然而,由于环境光照变化、果实遮挡等因素的影响,机器人在复杂环境下的识别精度有所下降。具体而言,在光照较强的条件下,识别精度降低了约5%,而在果实较为密集的环境中,识别精度的下降则可能达到10%。尽管如此,经过优化后的采摘算法能够有效地将误识别率控制在5%以内,保持较高的采摘成功率。实验结果显示,机器人在标准环境中的采摘成功率约为90%,在不同光照与环境条件下,该成功率有所波动,但依然保持在85%以上。
(二)实时性与系统响应能力
在苹果采摘过程中,系统的实时性和响应能力是影响整体效率的重要因素。实验表明,YOLOV5目标识别模块能够实时识别并输出苹果的位置,且平均延迟时间约为150毫秒,确保了系统能够在短时间内处理图像并传输数据给控制模块。对于机械臂控制系统而言,响应时间也非常关键,经过调试后,机器人在接收到目标位置后,机械臂的响应时间约为200毫秒。这样结合目标识别和机械臂控制的实时性,整个采摘过程从目标识别到机械臂执行动作的响应总时间为350毫秒左右,满足了高效采摘的需求。为了进一步验证系统的实时性,实验还进行了连续采摘任务测试,系统能够连续执行5-10次采摘任务而不出现明显的延迟或性能下降,表明其具备较高的实时性和稳定性。
(三)机器人在实际应用中的表现与问题
尽管机器人在标准测试环境下表现出色,但在实际应用中,仍然存在一些挑战和问题。实验中,机器人能够成功执行采摘任务,但在某些复杂环境下,目标识别精度下降较为明显,尤其是在苹果被树叶遮挡或光照较弱的情况下,目标识别精度较低。在这些情况下,苹果的定位信息出现偏差,导致机械臂无法准确抓取目标果实。为此,系统开发者正在进行优化,计划结合深度学习与传感器融合技术,提高系统在复杂环境下的识别能力。另外,在实际应用中,机器人采摘过程中的稳定性也有所影响,尤其是在快速移动过程中,机械臂在不同角度与高度下的操作存在一些不确定性,可能导致轻微的抓取误差。
结语
研究表明,基于YOLOV5的目标识别技术在苹果采摘机器人中的应用取得了显著的成效。在复杂的自然环境下,该技术能够有效识别苹果目标,并在一定程度上克服了光照、背景复杂等问题的影响。然而,现有模型在面对遮挡、果实姿态多变等因素时仍存在一定挑战。未来,随着数据集的进一步丰富与模型优化,YOLOV5有望在苹果采摘领域发挥更大的作用。此外,结合机器人控制系统、自动路径规划等技术,苹果采摘机器人的整体性能也将得到进一步提升,为农业自动化发展提供有力支持。
参考文献
[1]李晋超,朱晓军.改进YOLOv5s的葡萄采摘机器人果实检测[J].机械设计与制造,1-8.
[2]潘海鸿,钱广坤,陈希良,申毅莉,高港,陈琳.基于改进YOLOv5的柑橘采摘机器人识别定位方法[J].传感器与微系统,2025,44(05):57-61.
[3]钱福福,刘义亭,郁汉琪,颜庭武,杜俊峰,张昊.基于UR5苹果采摘机械臂的运动学分析及轨迹优化[J].自动化应用,2024,65(05):8-11.
[4]胡仕林,陈伟,张境锋,魏庆宇,金学广.基于改进YOLOv5的苹果采摘机器人目标检测方法[J].农机化研究,2024,46(06):48-55.
[5]寇雷雷,张红娜.基于改进YOLOv5的苹果采摘机器人多目标识别技术研究[J].中国农机化学报,2023,44(11):162-168.
[6]宋洋.基于改进YOLOv5的苹果采摘机器人目标识别与定位研究[D].兰州理工大学,2023.
[7]闫彬,樊攀,王美茸,史帅旗,雷小燕,杨福增.基于改进YOLOv5m的采摘机器人苹果采摘方式实时识别[J].农业机械学报,2022,53(09):28-38+59.
[8]霍晓东.苹果采摘机器人目标识别、跟踪与控制技术研究[D].天津理工大学,2022.
课题来源:邢台市科技局2024年度邢台市重点研发计划自筹项目
课题名称:《基于改进YO LO V5的苹果采摘机器人目标识别与定位研究》
项目编号:2024ZC406
.jpg)
.jpg)
.jpg)
.jpg)