.jpg)
辅助导梁式架桥机降低位过简支系杆拱施工技术要点探究

厚宝银
中铁三局集团线桥工程有限公司 河北省廊坊市 065201
1 引言
简支系杆拱结构因其受力合理与造型美观,广泛应用于铁路桥梁工程中,在复杂地形和既有通行条件下,大型架桥设备通行受到空间限制,常规驮运方式难以实施。为保障箱梁架设连续性与设备运行安全,研究辅助导梁架桥机在降低位状态下的通拱施工技术成为当前工程实践中的关键课题[1]。
2 降低位通拱作业核心技术环节
2.1 TLJ900 架桥机协同 KSC900 运梁车的技术机制
TLJ900 型架桥机具备高承载、大跨度适应和模块化结构特点,最大起重量可达 900t,架设跨度覆盖  至
至  ,采用下导梁辅助过孔模式配合双天车喂梁作业,具备结构高度
,采用下导梁辅助过孔模式配合双天车喂梁作业,具备结构高度  、主梁宽度18m的体积特征,在通行空间受限的简支系杆拱桥段,其高位状态无法满足拱下净空要求,需采用降低位通行策略以完成跨越任务。KSC900 运梁车作为配套设备,具备前后支撑可调节装置和均衡油缸顶升系统,能实现对架桥机主梁的平稳支撑与降位运输功能。作业过程中运梁车依托高位支撑系统完成从架桥机尾部进入并对接,油缸起升使驮运架构顶升架桥机后完成与支撑点一致的受力状态,随后拆除 O 型支腿及辅助支腿,采用电动倒链与手拉葫芦协同完成临时支腿吊装与固定,通过设置临时顶升支架和主梁端部的前支撑横梁,实现整机从原支立状态转变为低位支撑状态。在梁面完成支撑转换后,提梁机联合作业将架桥机主梁缓降至运梁车驮运平台,运梁车驮载架桥机后整体结构高度控制在
、主梁宽度18m的体积特征,在通行空间受限的简支系杆拱桥段,其高位状态无法满足拱下净空要求,需采用降低位通行策略以完成跨越任务。KSC900 运梁车作为配套设备,具备前后支撑可调节装置和均衡油缸顶升系统,能实现对架桥机主梁的平稳支撑与降位运输功能。作业过程中运梁车依托高位支撑系统完成从架桥机尾部进入并对接,油缸起升使驮运架构顶升架桥机后完成与支撑点一致的受力状态,随后拆除 O 型支腿及辅助支腿,采用电动倒链与手拉葫芦协同完成临时支腿吊装与固定,通过设置临时顶升支架和主梁端部的前支撑横梁,实现整机从原支立状态转变为低位支撑状态。在梁面完成支撑转换后,提梁机联合作业将架桥机主梁缓降至运梁车驮运平台,运梁车驮载架桥机后整体结构高度控制在  范围内,满足下穿拱桥拱肋与一字撑
范围内,满足下穿拱桥拱肋与一字撑  净空限制。该降位工艺对作业人员技术熟练度、吊装路径控制及各连接件对位精度提出严格要求,必须在设备稳定性、力学平衡性及通行轨迹预测基础上实施严密调度[2]。
净空限制。该降位工艺对作业人员技术熟练度、吊装路径控制及各连接件对位精度提出严格要求,必须在设备稳定性、力学平衡性及通行轨迹预测基础上实施严密调度[2]。
2.2 简支系杆拱结构适配与设备通过空间参数的精准匹配分析
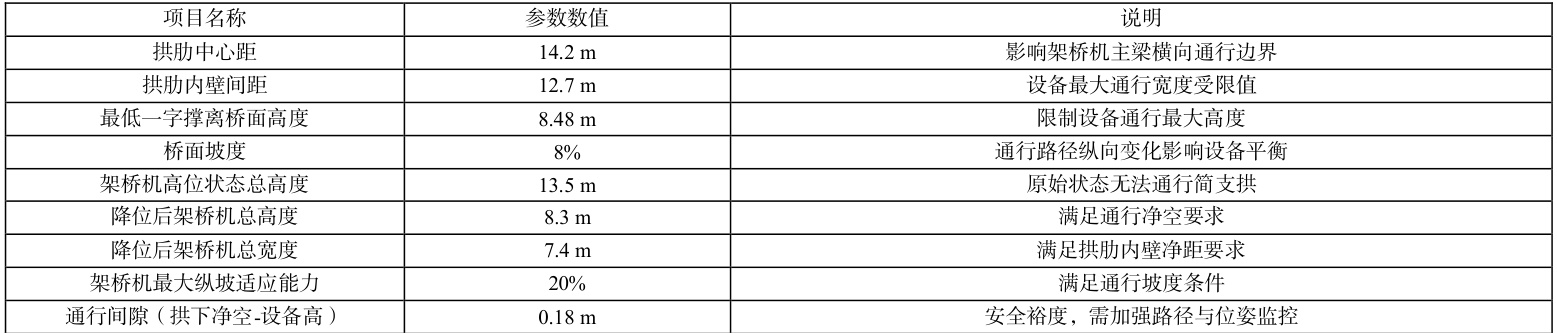
以南排河特大桥 409-410#墩段为例,两拱肋中心距为  ,拱肋内壁至内壁为
,拱肋内壁至内壁为  ,中间设置五道一字撑,最低一字撑离桥面
,中间设置五道一字撑,最低一字撑离桥面  且桥面下坡坡度为
且桥面下坡坡度为 。该结构布置对设备通行净空高度和宽度提出极为苛刻的条件限制,架桥机在原高位状态下高度为
。该结构布置对设备通行净空高度和宽度提出极为苛刻的条件限制,架桥机在原高位状态下高度为  ,远超一字撑限制,需通过结构降位方式完成净空避让。运梁车驮运架桥机后的宽度控制在
,远超一字撑限制,需通过结构降位方式完成净空避让。运梁车驮运架桥机后的宽度控制在  ,最大高度为
,最大高度为  ,刚好处于可通行极限边界。该状态下架桥机主梁与拱肋之间的净距不足
,刚好处于可通行极限边界。该状态下架桥机主梁与拱肋之间的净距不足  ,运输路径需严格控制横向偏移与纵向坡度影响,施工组织中需配置人工沿线监护和专人信号联控,实时调整设备姿态,防止拱肋剐蹭与结构干涉。设备在设计阶段已考虑最大纵坡
,运输路径需严格控制横向偏移与纵向坡度影响,施工组织中需配置人工沿线监护和专人信号联控,实时调整设备姿态,防止拱肋剐蹭与结构干涉。设备在设计阶段已考虑最大纵坡  与最小曲线半径
与最小曲线半径  的架设适应性,结合简支拱实际线形与坡度条件,通行路径沿直线下坡布置,运梁车需控制行驶速度在
的架设适应性,结合简支拱实际线形与坡度条件,通行路径沿直线下坡布置,运梁车需控制行驶速度在  以内,确保在拱段内动态姿态稳定。为加强结构适配的精准控制,架桥机各部件下方与梁面需加设橡胶垫片或柔性减震材料,减少桥面微拱或构造波引起的局部接触冲击[3]。一字撑与设备顶端的空间距离必须预先核算,结合下导梁和临时升降支架的极限高度边界确定最优路径方案。在设备进出桥段关键位置,吊装和支撑设施必须预先铺设,并完成对支点承载力、空间遮障、梁面硬化等作业准备,避免运输途中因结构挤压或动态位移造成机械卡阻或桥体损伤,详细见下表 1。
以内,确保在拱段内动态姿态稳定。为加强结构适配的精准控制,架桥机各部件下方与梁面需加设橡胶垫片或柔性减震材料,减少桥面微拱或构造波引起的局部接触冲击[3]。一字撑与设备顶端的空间距离必须预先核算,结合下导梁和临时升降支架的极限高度边界确定最优路径方案。在设备进出桥段关键位置,吊装和支撑设施必须预先铺设,并完成对支点承载力、空间遮障、梁面硬化等作业准备,避免运输途中因结构挤压或动态位移造成机械卡阻或桥体损伤,详细见下表 1。
3 关键构件拆装与吊装控制技术
3.1 关键构件稳定性保障措施
O 型支腿作为架桥机高位支撑与稳定运行的核心结构,其拆除与重装过程对整机稳定性与吊装协调性要求极高。在拆除阶段,需借助两台 450t 提梁机对主梁施加支撑力,使其在无 O 型支腿条件下保持纵向与横向刚性状态。架桥机原始支立状态下,需将前支腿、辅助支腿及 O 型支腿之间的受力传导关系彻底释放,才能确保拆卸作业的安全性。现场采用两台不同吨位吊车配合实施 O 型支腿分段拆除作业,先吊装马鞍梁,后拆解左右侧上横梁及立柱部件,每一钩作业需精确控制吊点位置与旋转角度,避免结构变形与受力失衡。辅助支腿因原设计安装在主梁下法兰面,无法满足架桥机降位后的净空需求,需拆除原有部件并更换为在高位法兰安装的新型临时辅支腿,该支腿具备法兰对接结构与限位销锁定功能,可在运梁车驮运与设备起升过程中提供稳定支撑。
3.2 关键构件力学计算
临时顶升支架与前支撑梁是实现架桥机降位的关键部件,其安装质量直接决定整机结构下移时的受力平衡与稳定状态。顶升支架总重 19t,需使用 100t 汽车吊完成整体吊装,吊装高度控制在  ,作业半径需控制在 21.6m 以内,经计算该作业状态下额定起重能力为30t,吊装负荷率约为
,作业半径需控制在 21.6m 以内,经计算该作业状态下额定起重能力为30t,吊装负荷率约为  ,满足安全系数要求。钢丝绳选型方面根据《重要用途钢丝绳》GB 8918-2006 与《起重吊装安全规程》TB10301-2020 标准,采用
,满足安全系数要求。钢丝绳选型方面根据《重要用途钢丝绳》GB 8918-2006 与《起重吊装安全规程》TB10301-2020 标准,采用  纤维芯钢丝绳,每根钢丝绳的最小破断拉力为 714kN,按照单根最大受力 6.1t 计算,安全系数超过 11,远高于规定标准。前支撑梁安装采用单钩提吊作业,结构重量为 2.8t,起吊作业在支点固定条件下进行,不涉及大幅旋转或高空转移,吊装过程稳定性较高。临时升降支架安装完成后,与主梁法兰采用高强螺栓连接,定位精度需控制在
纤维芯钢丝绳,每根钢丝绳的最小破断拉力为 714kN,按照单根最大受力 6.1t 计算,安全系数超过 11,远高于规定标准。前支撑梁安装采用单钩提吊作业,结构重量为 2.8t,起吊作业在支点固定条件下进行,不涉及大幅旋转或高空转移,吊装过程稳定性较高。临时升降支架安装完成后,与主梁法兰采用高强螺栓连接,定位精度需控制在  内,连接后以加力扳手进行紧固,确保顶升过程中无相对滑移。
内,连接后以加力扳手进行紧固,确保顶升过程中无相对滑移。
4 结论
辅助导梁式架桥机在简支系杆拱桥段实施降低位通行作业展现出较强的技术适应性与施工安全性。架桥机与运梁车的协同配合、关键构件的精密拆装控制、通行净空的精准匹配分析,共同构建了完整可靠的作业体系。工程实施结果表明该工艺在复杂桥型条件下具备较高的推广价值,为后续同类工程提供了成熟的技术路径与组织范式。
参考文献
[1]李宣谕,雷鉴琦,魏泽辉,等. 基于数理分析识别风电机组偏航系统静态偏差方法研究[C]// 吉林省电机工程学会. 吉林省电机工程学会2024 年学术年会获奖论文集. 大唐东北电力试验研究院有限公司;大唐贵州发电有限公司新能源分公司;, 2024: 454-460.
[2]王鑫,许晓辉. 考虑可信度偏差的在线教育情感多模态识别 [J]. 传感器与 微系统, 2024, 43 (11): 122-126.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)