.jpg)
新能源汽车智能车灯控制系统设计

王森 张思豪 牛泽同 吴宜蒙 郑博远
扬州职业技术大学 电气与汽车工程学院 扬州 225100
引言
新能源汽车车辆安全性是驾乘的核心要素,随着智能技术的发展,已从被动安全逐步转向主动安全与智能安全系统。据统计,我国每年近十万人死于交通事故,夜间事故率是白天的3 倍以上,多数与照明系统使用不当有关。不当使用前照灯易造成视觉障碍和误判,增加事故风险。作为新能源汽车电控关键技术之一,前照灯系统正向智能化、网络化方向发展。它在复杂路况和基础环境较差时仍存在局限,亟需智能化升级。智能车灯控制系统通过传感器和算法感知环境及车辆状态,依托计算平台和CAN 总线通信技术,动态调节前照灯光束与光型,消除视野盲区、避免眩目,提升照明效果。该系统有助于改善行车安全、降低事故发生率,是车辆智能化发展的必然趋势。
1. 基于CAN 总线的车灯控制系统概述
本文所研究的新能源汽车车灯控制系统主要包括了左前车灯控制、右前车灯控制系统、左后车灯控制系统、右后车灯控制系统以及倒车雷达系统,共涵盖 5 个相关的控制单元。车灯控制中 CAN-BUS 网络的使用,提高了汽车车灯控制的智能化水平,并使信息共享、功能扩展变得更容易,连接线的减少,降低了线束使用和车身重量,有利于降低整车能耗。
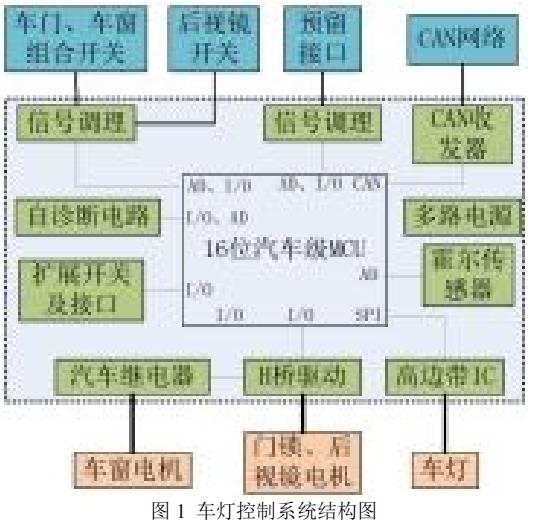
通过“ECU+CAN 网络”的方式,可以轻易实现车灯的智能化控制,车灯 ECU 根据CAN 网络、本地开关信号输入来控制新能源汽车组合灯中各个灯的亮与灭。利用 ECU及 CAN-BUS 网络的优点,实现了车辆示宽灯、远近光灯、转向灯、雾灯、刹车灯、倒车灯等的智能控制,减少汽车线束数量,使控制变得更加智能,功能扩展变得更加容易。车灯控制系统结构如图1 所示。
2. 基于 CAN 总线的智能车灯控制系统组成及功能实现
新能源汽车智能车灯控制系统包含了:车辆整车控制器 MCU、智能车灯控制器、车辆 BCM、智能导航系统、部分自动驾驶系统、自身灯光器件等。其中,智能车灯控制器是通过 CAN 总线与车身控制器和自动驾驶系统部分进行通讯连接的,通过 CAN总线通信接收车辆实时路况信息,包括车辆行驶速度等自身情况、路况、行人等障碍物情况等信息,为智能车灯控制与调节提供信息,实现不同工况和环境下的自适应调节。
CAN 总线作为通讯中转站既接收来自外部环境和内部车辆驾驶意图的信息,同时也将信息传递给智能车灯控制器,实现车灯在不同环境下各类灯光的切换和控制。
本文选用的车灯驱动模块是半导体式车灯驱动模块,具有内阻小可替代传统继电器的特点,又具有可以通过微控制器或外部信号实现小电流、小电压控制大电流大电压的特点。车灯驱动模块采用飞思卡尔公司汽车专用车灯驱动芯片,该芯片具有高边带输出驱动特性(即输出正向驱动电压),适合于汽车环境使用(汽车车体为搭铁的特点)。
智能车灯控制器将接收的环境信息信息通过 CAN 总线实现传递,将新能源汽车各类灯光的开关和控制信号传递给单片机,再由单片机进行输出控制,通过控制多通道芯片控制车灯的开关与亮度。本文所设计的智能车灯系统可根据 LED 串的数量进行相关的组合式配置,形成的车灯系统在不降低灯光效果的前提下,经济成本显著降低。车灯控制芯片能够实现对每个 LED 灯的精准点亮控制,实现现有新能源汽车多样化场景车灯变化的需求。
智能车灯控制系统软件软件部分的整体架构包含了三个层,分别为应用层、运行时环境层和软件代码包层。其中应用层负责整车 CAN 报文的收发与处理,具体包括解析接收到的整车CAN 报文,以及封装待发送的报文数据并上传至整车网络;运行时环境层基于 CAN 总线系统,负责协同管理 MCU I/O 口、LED 状态驱动及反馈信号,以此实现核心任务管理,其中包括处理 OTA 升级流程、执行 MCU 工作模式转换与实施系统异常状态监测;软件代码包系统集成了多种外设接口以实现核心功能:MCU 通过外接 CAN 收发器负责CAN 总线数据的收发;利用其自身的SPI、GPIO 和 ADC 资源驱动LED;OTA 功能则通过读写 EEPROM 并利用 UART 进行数据传输来实现。
3. 基于 CAN 总线的智能车灯控制系统方案设计
本文设计的智能车灯控制系统采用 TVS 管作为高效保护器件,新能源汽车智能LED 灯具的电源线需选用不低于600W 的 TVS 管,CAN 或 LIN 通信线则需选用不低于300W 的TVS 管,器件寿命要求超过 10 年,工作温度范围需覆盖-45℃至125℃。同时,矩阵芯片的选型需综合考量LED 驱动电压、驱动电流、LED 数量及系统总功率等多重因素。对于应用于多场景照明的矩阵芯片,其模式实现主要通过控制远近光光学模组的LED 的亮与灭进行。而对于部分新能源汽车智能动感灯光的芯片选择,其功能实现主要通过过控制日间行车灯、转向灯、车辆位置灯LED 的亮灭进行。而对于车辆智能投影灯光的功能实现,则是通过控制多数量的 LED 灯亮灭进行,要求的通道数较多。因此,不同模式的矩阵芯片选择应根据应用场景的不同而有所区别。
4. 结束语
本文围绕新能源汽车智能车灯控制系统展开研究,基于 CAN 总线构建了涵盖前后车灯及倒车雷达的多单元控制架构,实现了车灯智能化控制与系统信息高效集成。通过ECU 与 CAN 网络协同,系统能够依据车辆状态与环境信息动态调节照明,有效提升行车安全性与能效。
参考文献
[1]刘乾,徐彪,宣立明,等. 一种汽车 LED 动态转向灯检测系统研究 [J]. 农业装备与车辆工程, 2022, 60 (10): 149-152.
[2]黄常清,罗诗明,杨才生,等. 汽车智能化车灯控制系统方案和软件方案设计 [J].时代汽车, 2023, (13): 97-99.
[3]陈青. 汽车智能化车灯控制系统方案设计 [J]. 汽车测试报告, 2023, (19): 23-25.
[4]刘风旺,邹月英,韩娜,等. 智能网络化前照车灯控制系统开发 [J]. 客车技术与研究, 2024, 46 (02): 32-35. DOI:10.15917/j.cnki.1006-3331.2024.02.003.
[5] 黄 禹 . 基 于 单 片 机 的 车 灯 智 能 控 制 的 研 究 [D]. 常 州 大 学 , 2023.DOI:10.27739/d.cnki.gjsgy.2023.000273.
基金项目:2024 年江苏省职业院校大学生创新创业培育计划立项项目
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)