.jpg)
工业机器人在线文档资源建设的研究

赵予安
江苏省常熟中等专业学校 江苏常熟 215500
1.引言
当前中职院校工业机器人专业的教学资源建设相对滞后,面临以下问题:一是教材资源匮乏且更新缓慢,多数教材局限于特定品牌或型号,通用性不足,内容落后于企业实际应用;二是教学资源形态单一、分布零散,缺乏系统整合,加重教师备课负担,不利于学生构建完整知识体系;三是教学环境与资源使用模式存在矛盾,课堂手机使用受限、机房网络隔离,导致许多优质在线资源难以在核心教学中发挥作用,数字化教学优势无法体现。
本研究基于这一背景,开发了一套基于docsify框架的面向中职工业机器人专业的在线文档资源系统,重点解决“在线更新”与“离线使用”的关键技术问题,提升课堂教学质量。
2. 在线文档系统的设计与实现
2.1 系统架构选型
在众多静态网站生成器中,我们选择了docsify作为核心架构,主要基于其以下优势:
(1)轻量级与简单性:docsify采用运行时Markdown解析,无需生成静态HTML文件,部署和更新简单。
(2)极致的学习体验:界面清新简洁,支持侧边栏导航、全文搜索、代码高亮、图片缩放等功能,适合技术文档的阅读。
(3)高度的可定制性:通过插件系统和自定义CSS,可以轻松实现个性化界面定制和功能扩展。
(4)对离线功能的原生支持:可以轻松实现资源的本地缓存,支持离线使用。

图1:在线文档封面
2.2 内容体系结构设计
本文档内容采用“总-分”结构进行设计:
第一层级(基础认知):工作站总体介绍、安全操作规程、设备启动与关机流程。
第二层级(核心技能):ABB机器人基础操作、RAPID编程基础。
第三层级(系统集成):西门子 PLC基础编程、威纶通触摸屏组态设计、机器人与PLC/触摸屏的联调。
第四层级(进阶应用):算法、典型应用案例、常见故障诊断与排除。
此结构由浅入深,既保证了知识体系的完整性,又赋予了学生自主探索的灵活性。
图2:在线文档目录
3.3 核心创新:“在线更新”与“离线使用”双模式机制的实现
这是本项目解决“网络隔离”与“内容更新”矛盾的关键技术方案。
(1)在线版本
部署于公有云服务器(如阿里云、腾讯云)或具备公网IP的学校服务器上。项目维护人员在本地修改文件并推送至代码托管平台(如Gitee或GitHub),实现网站的实时更新。
(2)离线版本
将整个docsify网站目录打包,通过U盘或校内局域网,分发并部署到机房电脑上。学生通过浏览器访问本地地址(http://localhost:3000)即可使用。
(3)同步与更新机制
①管理员定期(每月或重大更新后),通过校内文件服务器或U盘分发到各机房管理主机。
②机房本地更新:机房管理员解压新版本离线包,覆盖替换旧版本文件。
③优势:此机制契合了中职学校的管理实际,既保证了机房环境的封闭性要求,又打破了内容更新的壁垒,实现了“外部动态更新,内部静态使用”的平衡。
4.在线文档内容的设计与编写策略
4.1 内容组织原则
(1)任务驱动:以完成一个具体的机器人应用任务为主线,将所需的理论知识、操作步骤、编程指令融汇其中,避免理论与实操“两张皮”。
(2)多媒体融合:对于关键操作步骤,采用“文字说明 + 步骤截图 + 箭头标注 + 实操视频链接”的多媒体组合形式。学生通过链接即可观看操作视频,降低了理解门槛。
(3)代码即文档:所有RAPID程序代码均提供可复用的示例片段,学生可直接复制到编程软件中学习、调试,强化实践动手能力。
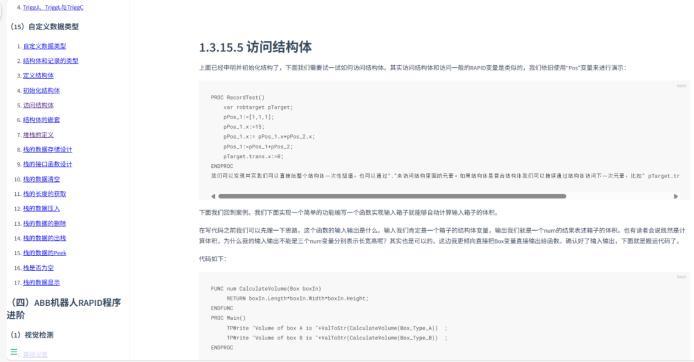
图3:在线文档内容
5. 资源维护、更新与团队协作机制
为确保项目的可持续运行,我们构建了一个微型但高效的协作体系:
(1)角色分工
项目负责人(1人):负责整体规划、内容审核、服务器维护和版本发布。
内容开发人员(2-3人):由专业课教师和企业工程师组成,负责核心内容的编写与更新。
资源收集员(1人):负责从技术论坛、厂商官网、专业公众号等渠道搜集前沿技术资料和典型应用案例,提供给开发人员作为素材。
(2)更新流程
内容开发→内部评审→提交Git→自动部署(在线版)→生成离线包→分发部署(离线版)。
6.应用情况与效果分析
自本系统在本校2022级和2023级工业机器人专业两个班级中试点应用以来,已历经一个学年,取得了初步成效:
(1)学生学习积极性提高:课间和课后主动在机房电脑上查阅文档解决疑问的学生比例显著增加。
(2)课堂教学效率提升:教师无需再重复演示基本操作,可将更多课堂时间用于指导学生解决复杂工程问题和进行深入实践。学生根据文档指引自主完成基础操作练习,错误率降低。
(3)教学资源及时迭代:在一个学期内,我们根据教学反馈和设备软件升级,对文档进行了3次版本更新,及时修正了5处错误,增加了1个新的视觉分拣案例,资源更新比传统教材更加及时。
(4)解决了网络制约:离线版本在机房运行稳定,访问速度快,保证了教学活动的顺畅进行。
当然,系统也存在一些待改进之处,例如目前离线版本的更新仍需人工介入,未来可探索开发更自动化的局域网内增量更新工具。此外,还可增加在线测试、学习进度跟踪等更多交互功能。
7. 结论与展望
本研究成功设计并实践了一套基于docsify架构的工业机器人在线文档资源系统,成功的实践了“在线集中更新,离线分布式使用”的双模式运行机制,有效破解了先进教学资源与封闭教学环境之间的矛盾。实践证明,该系统能显著提升教学资源的质量和可用性,支持混合式教学模式的开展,对提高工业机器人专业人才的培养质量具有积极的促进作用。
展望未来,我们将从以下几个方面继续深化研究:
(1)内容拓展:进一步丰富案例库,特别是融入更多融合视觉感知、力觉控制等新技术的应用案例。
(2)功能增强:集成轻量级的在线编程模拟环境(如基于Web的简单RAPID仿真),让学生在阅读文档的同时即可进行代码编写和逻辑验证。
(3)生态共建:尝试与兄弟院校建立联盟,共同维护和开发该文档资源,形成资源共享、优势互补的良性生态,最终使其发展成为区域内中职工业机器人专业的一个标准教学资源平台。
参考文献
[1]廖玉伟,苏文兵.OBE-CDIO理念下工业机器人技术专业实践教学体系探索与实践[J].教育观察,2025,14(04):84-89.DOI:10.16070/j.cnki.cn45-1388/g4s.2025.04.004.
[2]段震.基于大数据离线技术的高校智慧教育平台数据应用[J].山西能源学院学报,2024,37(06):37-39.
[3] Docsify官方文档. https://docsify.js.org/[Z].
【作者简介】赵予安(1996-12),男,汉族,江苏常熟,本科,教师,助理讲师,研究方向:工业机器人操作与应用,工业机器人系统集成,机电一体化设备操作与维护。
.jpg)
.jpg)
.jpg)
.jpg)