.jpg)
“一筹漠斩”

董泓麟 姜涛 时帅霖
天津职业技术师范大学 自动化与电气工程学院 天津
1 引 言
在国家大力推进生态文明建 核心任务之 。近年来,我国相继出 政策文件,强调科技 柳科落叶灌木,具有 关键物种。然而,传统沙 足大规模治理需求; 因挖穴深度不足、培土不 植设备成为突破上述瓶 应用,但针对荒漠环境的沙 流程自动化能力。 基于此, 旨在实现沙柳苗种植的无人化、 植设备的技术空白,更响应了国家“科技治沙”的战略需求,
2 系统设计与实现
2.1 机械结构设计
机器人的机械系统采用模块化设计,由储苗单元、种植执行单元、移动底盘三部分组成,各模块通过标准化接口连接,便于维护与升级。
图1 功能模块划分
2.1.1 储苗单元
储苗单元是机器人的“苗源库”,设计为 5 行 3 列的矩阵式结构,可容纳 15 株沙柳苗。其创新点在于双向移动机制:沿x 轴方向,通过N20 电机驱动齿轮齿条结构实现左右平移;沿y 轴方向,由滑轨滑块配合电机驱动完成前后移动。该设计使储苗盒能精准定位至投苗口,配合机械臂完成取苗动作。储苗盒采用 3mm 亚克力板激光切割成型,重量仅 1.2kg,既保证结构强度又减轻底盘负荷;底部凸台与支架凹槽的配合设计,确保移动过程中的稳定性。 2.1.2 种植执行单元
种植执行单元是核心作业模块,集成挖穴、投苗、培土、浇水四大功能,通过协同动作
现标准化种植。 挖穴装置:由升降机构与旋转钻头组成。N20 电机通过锥齿轮传动驱动钻头旋转(转速可调至 300r/min) ),同时另一台 N20 电机通过齿条带动整个装置沿竖直方向移动,实现 0-50cm 深度的挖穴作业。钻头采用螺旋叶片设计,土壤排出效率较传统直刃钻头提升40%,适应荒漠地区沙质土壤特性。
投苗机构:衔接储苗盒与挖穴装置,通过倾斜式导苗管实现幼苗直立下落。导苗管内壁敷设硅胶涂层,摩擦系数降低至0.15,避免幼苗卡滞。
培土装置:采用“牛角式”压头结构,由两台 N20 电机分别控制水平伸缩与旋转动作,可从三个方向对穴口土壤进行压实(压力达 50N),解决沙质土壤易松散的问题。经 SolidWorks Simulation 仿真优化,压头最大应力从120MPa 降至37MPa,使用寿命延长至5000 次以上。
浇水系统:集成 1.5L 储水箱与微型水泵,通过红外传感器检测幼苗位置后,精准喷施 50-100ml 定根水,节水率较人工浇灌提升60%。
2.1.3 移动底盘
移动底盘采用四轮驱动结构,轮胎直径15cm,宽5cm,表面纹路深度2mm,抓地系数达0.8(沙质路面)。底盘框架采用 2mm 不锈钢板激光切割成型,承重能力达 15kg ;前后轮距 80cm,轴距 60cm,最小转弯半径仅 50cm,适应荒漠地区复杂地形。底盘中部安装减震弹簧,可缓冲 10cm 高度的颠簸,保障种植执行单元的作业精度。
2.2 控制系统设计
控制系统采用“上位机- 下位机”架构,实现远程监控与本地自主控制的双重模式。
2.2.1 硬件系统
核心控制器:选用Arduino Mega2560 作为下位机主控,其16MHz 主频与54 路数字I/O 口可满足多电机协同控制需求;支持PWM 脉冲宽度调制,实现电机转速的无级调节。
驱动模块:采用双驱动方案——HR8833 模块驱动 N20 微型电机(工作电流 0.3A),控制储苗盒与挖穴装置的精细动作;Quad Motor Driver Shield 扩展板驱动 25GA370 直流减速电机(峰值电流 3.2A),负责底盘移动与钻头旋转。
通信模块:搭载 APC220 无线数传模块,采用 GFSK 调制方式,在开阔地传输距离达 1000m,支持 9600bps波特率的双向通信,实现上位机指令下发与设备状态回传。
传感器组:包括 DS18B20 温度传感器(监测环境温度)、HC-SR04 超声波传感器(检测障碍物)、土壤湿度传感器(反馈种植点墒情),为智能决策提供环境数据。
2.2.2 软件系统
软件系统分为上位机监控软件与下位机控制程序,通过串口通信实现数据交互。
上位机程序:基于Winform 平台开发,具备三大功能:一是串口管理,自动检索可用端口并建立连接,连接失败时触发“通讯口未找到”报警;二是远程操控,通过按钮下发“单步作业”“自动种植”等指令;三是数据可视化,实时显示机器人位置、剩余苗数、电池电量等参数,支持历史数据导出。
下位机程序:采用事件驱动式设计,主循环(loop 函数)每秒执行10 次状态检测:当接收到上位机指令时,解析指令代码(如“0x01”代表挖穴)并调用对应子程序;无指令时,执行预设种植流程。程序内置故障自诊断模块,若检测到电机堵转、传感器异常等情况,立即触发声光报警并停止作业。
2.3 导航与定位系统
为适应荒漠地区 GPS 信号弱、地形复杂的特点,导航系统采用“多传感器融合 + 预编程路径”的混合定位方案。
定位层:集成 GPS 模块(定位精度 ±5m)与惯性测量单元(IMU),通过卡尔曼滤波算法融合数据,在 GPS信号丢失时,IMU 可维持10 分钟内±0.5m 的定位精度。
路径规划层:基于A* 算法优化行驶路线,考虑三个约束条件:一是避开坡度>15°的区域,防止底盘打滑
避障层:超声波传感器(探测距离0.2-4m)实时扫描前方环境,当检测到障碍物(如石块、沙丘)时,自动绕行并重新规划局部路径,响应时间<0.5 秒。
2.4 动力系统 动力系统采用“太阳能+ 锂电池”的混合供电方案,兼顾续航与环境适应性。
能源存储:配置12V/20Ah 锂电池组,容量240Wh,支持机器人连续作业6 小时(含种植150 株苗)
充电模块:车顶安装100W 柔性太阳能板,转换效率22%,在荒漠地区正午阳光下,日均发电量可达400Wh,满足日均能耗的1.5 倍,实现“自给自足”。
能量管理:BMS 电池管理系统实时监控电量,当剩余电量 < 20% 时,自动触发“返回充电点”指令,避免因断电滞留荒漠。
系统上:为确保导航与定位系统的可靠性,系统还引入了冗余设计。在 GPS 信号完全失效的极端情况下,惯性测量单元结合里程计数据可提供基础导航支持,尽管精度有所下降,但仍能完成短距离的种植任务。此外,导航模块通过与上位机的实时通信,可以接收人工干预指令,从而实现半自主运行模式。路径规划算法经过多次实地测试优化,能够有效应对荒漠地区常见的地形变化,如沙丘起伏和干涸河床等地形特征。系统还具备学习功能,每次作业后会将实际行驶轨迹与预设路径进行比对,不断优化路径规划策略,提高后续作业效率。
3 实验验证与分析
效率测试:在模拟荒漠环境中,连续作业3 小时,平均每小时种植115 株,较人工种植效率提升约150% ;
精度测试:挖穴深度误差≤±2cm,投苗垂直度偏差≤5°,培土紧实度达标率92% ;
环境适应性:在风速5m/s、沙质土壤含水率5% 的条件下,各模块无故障运行,验证了荒漠环境的适用性。
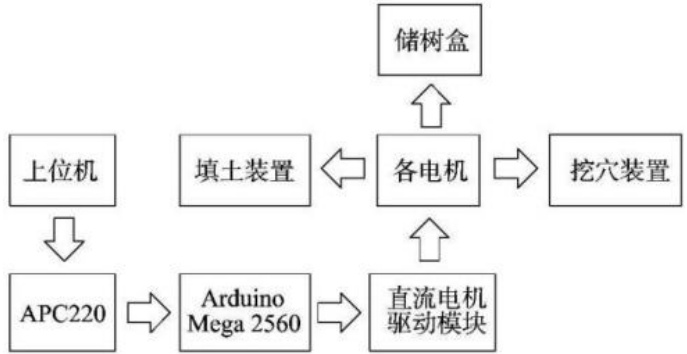
上位机:发送种植指令,可设置参数、监控状态。
PC220 :无线数传模块,负责上位机与主控板间指令和数据传输。
Arduino Mega 2560 :下位机主控板,解析指令、控制电机,协调各装置作业直流电机驱动模块:放大主控板信号,为挖穴、填土等电机提供适配功率。
各电机:驱动挖穴、填土装置动作,挖穴电机控制挖穴深度与动力,填土电机实现精准回填压实 。挖穴 / 填土装置:执行机构,挖穴装置完成沙质土壤挖穴,填土装置解决沙质土松散问题,保障苗木根系稳固。
储树盒:存储苗木,配合流程有序供苗,衔接种植工序 。
整体通过“指令下发 - 执行 - 反馈”闭环,实现挖穴、投苗、培土自动化,助力荒漠化治理高效作业。4 结论与展望
本文设计的全自动沙柳苗种植机器人通过模块化机械结构与智能控制系统的融合,实现了沙柳苗种植全流程自动化,突破了传统人工种植的效率低、成本高、成活率低等瓶颈。其创新点在于:双向移动储苗机制提升了取苗定位精度,螺旋钻头与牛角式培土装置适应了沙质土壤特性,“上位机 - 下位机”架构实现了远程与自主控制结合。
实验表明,该机器人可满足荒漠地区规模化种植需求,为“科技治沙”提供了技术支撑。未来将从三方面优化:一是扩大储苗容量至50 株,进一步提升续航能力;二是集成环境传感器(如风速、土壤盐分检测),实现种植参数动态调整;三是开发多机协同控制系统,形成集群作业模式,助力更大范围的荒漠化治理。
参考文献
[1] 张建国,李智勇。中国沙化土地治理现状与展望 [J]. 林业科学,2023, 59 (2):1-10.
[2] 王涛。沙柳等灌木在荒漠化防治中的生态功能 [J]. 生态学报,2022, 42 (5):1801-1810.
[3] 刘刚。农业机器人技术进展与应用 [J]. 农业机械学报,2021, 52 (3):1-16.
[4] Smith J, et al. Field robotics for desert reclamation: A review [J]. Journal of FieldRobotics, 2020, 37 (4):567-589.
[5] 陈智,王鹏。基于 Arduino 的小型农业机器人控制系统设计 [J]. 自动化与仪器仪表,2020(6):102-105.
基金项目:市大学生创新创业训练计划项目“一筹漠斩”——全自动沙柳苗种植机器人(项目号:202510066077)
作者简介: 时帅霖(2006-),男,本科生,自动化专业。
董泓麟(2005-),男,本科生,自动化专业。
姜涛(2005-),男,本科生,自动化专业
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)