.jpg)
反循环钻机的技术升级研究

彭高文
湖南超鹰速智能科技有限公司 410199
1.机械手装卸钻杆自动化
主要的动作流程有:开门板自动开合-动力头自动上下-钻杆自动装卸)。结构上设计一个抓盘,可以抓住钻杆左右摆动,将钻杆移动到拆卸和安装的位置,在这个过程中,主要是控制摆杆的两根油缸要实现同步,为止专门设计一个电控的控制流量的同步阀,保证两个油缸的同步性,采用分流集流,两个油缸的动作不受负载的影响。
2.履带底盘自动调平
履带底盘带有四个支腿油缸,每个油缸都带有液压锁,以往需要靠操作手一个一个油缸进行操作,最终调整到机器处于平衡的状态,整个过过程耗时比较长,尤其是微调的时候,要反复操作各个油缸,最后也难达到完全水平的状态,同时在工作的过程中,由于地面下沉,又需要重新调整,整个过程费时费力,而且容易出现不水平的情况。在原有油路的基础上每个油缸上并一个液压锁。然后小电机驱动小液压泵,接四个电比例阀给新接的液压锁供油。最后通过水平传感器实时反馈信号,通过程序实现四个油缸在同一水平面上。
去改变原有的系统会比较复杂,在设计的过程中,我们尽量不去动原有的液压系统。具体改造方案为采用双系统,增加两个电比例控制阀,可以单独控制四个油缸的动作,在原有液压锁下面加一个阀块,采用双液压锁结构,统统两个比例控制阀控制四个油缸,每个油缸增加位置传感器,同时设备上面加装一个水平传感器,数据进入控制器解析,即可实现一键垂直,四个油缸同时调整到水平状态,在干活的过程中,一旦出现倾斜,会自动报警,操作人员只需按一键垂直,就可以重新达到平衡的状态。
3.大架垂直监测与报警
在大架上加装角度传感器,如果角度偏离达到设定值,自动报警,达到极限设定值,不允许使用,一般设置为往前5 度,左右5 度,增加一个4.3 寸的控制显示一体屏,角度传感器采集到的角度数据进入控制器进行解析,一旦超出角度,则操作无效,如果需要继续操作,可以在屏幕上面进行强制解除。另外设置灯光报警器,一旦角度远远超出设置角度,报警灯响起,说明设备存在倾翻的风险,需要人为进行干预,最后达到安全施工的目的。
4.卡钻报警
要解决这个问题,首先要判断是否卡钻,针对不同的动力头有不同的判断方法,如果动力头是液压的,检测到液压压力达到极限,但是钻杆未转动则报警,如果动力头是电机的,检测到电机有通电,但是钻杆未转动则报警。
根据以上的判断分析,主要是检测液压 力和电机 否通电和动力头钻杆是否转动进行对比。针对液压的动力头,只需增加压力传感器以及动 设 系统压力,但是动力头转速为 Z ,说明是卡钻的状态,通过报警器报警 用反转自动解决卡钻问题。针对电机带动的动力头,则需要增加电路通断的传感器和动力头转速传感器,具体解决方式同液压动力头。
5.履带行走增加遥控操作
设备在行走的过程中,遇到危险的软底层,机手在设备上操作不是很安全。另外在运输的过程中,设备上板车也容易出现倾翻的风险,这个时候,如果设备增加有行走遥控系统,就能大大降低操作人员的安全风险,降低施工风险。
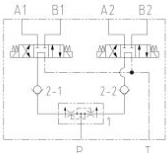
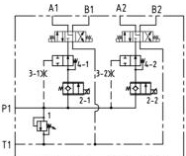
在行走先导脚踏阀下面增加先导的电磁阀,由减压阀控制液压阀的高低速,从而实现可以通过电控控制设备的行走,加上逻辑选择阀,电控控制设备的同时,不影响原有手动动作的操作。
具体控制的原理如下图:梭阀的主要作用是不影响原有手动动作,电磁阀 A,电磁阀 B,主要控制左右行走的前进,后退等等,快慢速调节阀主要是为了实现在遥控过程中由两个挡位,慢速档和快速档,尤其在上板车的时候,一般都是采用慢速档,太快了容易出现倾翻的风险。

6.柱塞泵排量调节
在隧道施工或者高原地区施工会出现一种情况,一旦负载过大,发动机会熄火。通过采集发动机的转速数据,同时接入到主泵的排量控制减压阀。通过程序控制,一旦掉速,则通过电控控制主泵上的减压阀控制主泵排量,降低流量,减少功率,解决发动机在隧道施工或者高原地区施工因为氧气不足,造成动力不足熄火的情况。
7. 自动显示系统
在钻机上有显示屏,显示柴油机的转速、油温、水温、扭矩、功率、机油压力,显示发电机的转速、电压,显示泥浆泵的流量,显示动力头的扭矩,显示卷扬机的压力等。
8. 故障检测系统
通过采集到的数据和设定的数据进行对比,通过分析初步判断设备可能出现的故障情况,比如电瓶电压不够,可能是需要更换电瓶了,比如检测到液压先导压力过低,可能是先导溢流阀或者先导泵出现了问题,特别是没有先导压力的时候,再结合电控是否给总先导阀供电,从而判断是液压问题还是电路问题。再结合动力头钻速如果上不去,这个时候主泵压力也上不去,这个初步可以判断是主阀主溢流阀的问题或者是主泵的问题。检测到的数据越多,故障判断越准确,减少人工现场判断故障的时间。
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)