.jpg)
基于工业互联网的双目标系统的完全分布式观测

范真
江苏自动化研究所 江苏连云港 222061
1 引言
状态估计(state estimation)是控制理论与应用中的一个经典、重要的主题 [1,2] ,其主要针对系统状态难以获取甚至无法获取的系统。在这种情况下,可以通过构建观测器来实现对目标系统状态变量的估计 [1,2] ,进而,找出使得观测器的状态变量与目标系统状态变量之间的误差随着时间趋向于无穷大而收敛到零的条件 [1-3 。经典的观测器理论主要是实现观测器与系统状态之间的“一对一”的估计,即用一个传感器来实施对目标系统完整输出信息的测量,进而在此输出信息的基础上,设计一个观测器来实现对目标系统完整状态的估计,例如文献 ⌊1-4- ]。然而,实际工程中存在很多“区域性”的目标系统 [5],如大型生产车间、灌溉系统、太阳能田、原油泄漏及扩散 区域、城市供水系统,这类目标系统占据着地理上的大范围区域。由于单个传感器功能简单,处理场景单一,从而无法保证对大范围目标区域的完整信息采集,因此,由互联网与工业系统、先进智能运算、传感技术等全方位深度融合所形成的工业互联网是这类大范围目标区域输出信息处理的智能化设施 [5],其主要包括网络、平台和安全这三大功能体系 [6],涉及无线网络技术、工业数据采集技术、数据存储技术、数据分析数据等。例如,在大型生产车间中搭建一种基于工业互联网的监测系统,通过多个机器人、传感器网络等智能设备实时采集车间中不同区域的生产数据、安全数据、环境数据等,再通过监测系统的网络从信息接入设备获取采集到的数据,远程监控车间的各种信息,计算出整个车间的各类数据,进 而管理车间生产及安全,再比如工业互联网在城市供水系统监管中的应用 [7]。另外,工业互联网在高精度目标系统的信息采集中,也具有明显优势。例如,使用单个精密的传感器来实现对一个小房间中的温度、湿度、压强、PM2.5、含氧量、甲醛含量等数据的测量,其造价成本、数据准确度等远不及工业互联网。因此,具备智能设备、智能系统、智能决策等关键要素 [8] 的工业互联网为大规模目标系统的输出信息测量提供了基础的、必备的技术手段。近年来,在工业互联网的技术支持以及多智能体系统的一致性算法影响下,分布式观测器被提出来,用以解决大规模目标系统的状态估计。图 1 给出了分布式观测器的工作机理。
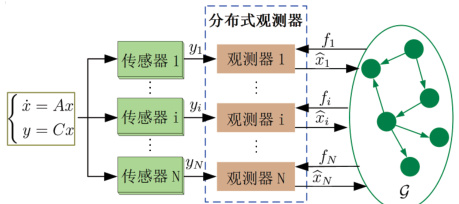
图 1 基于工业互联网的线性时不变系统的分布式观测器,图中是fi(⋅) 为变量  的函数,其中 L 是信息交互拓扑图 G 的拉普拉斯矩阵。
的函数,其中 L 是信息交互拓扑图 G 的拉普拉斯矩阵。
具体地,对于一个高维系统 
式中 x∈Rn×1 和 y∈Rp×1 分别为大规模目标系统的状态和输出。由于输出信息 Δy 是大规模的,使用单个传感器无法实现对其完整信息的获取。基于工业互联网,在分布式观测器的设计中,使用 N 个传感器来实施对输出信息 y 的测量,其中每一个传感器只需测量 y 的部分信息,如第 i 个传感器测量得到的输出信息为 yi=Cix ,其中 Ci 为 C 的部分行向量。如图 1 所示,每一个传感器将其测量得到的输出信息传递给其对应的观测器,然后每一个观测器根据所接收的输出信息以及其邻居观测器之间的信息交互,来设计算法以实现对目标系统完整状态的有效估计。
在某些特定场景下,我们需要对两个相互耦合的、大规模目标系统分别进行状态估计,如文献 19] 中的机艇协同中每一架无人机和每一艘无人艇的状态估计。将所有的无人机和无人艇分别看成两个目标系统。由于每一架无人机(或者每一艘无人艇)之间的距离可能较远,相比使用单个传感器来实现所有的无人机(或者所有的无人艇)的输出信息的测量,通过使用多个相互通信的传感器来测量每一架无人机(或者每一艘无人艇)的输出信息更容易实现。 本文将在工业互联网的基础上,研究线性时不变的两个异质目标系统的分布式观测问题。总地来说,本文研究重点如下:
1) 对于相互耦合的两个异质并且维数不同的线性时不变目标系统,我们将用两组传感器网络来实现对两个目标系统的分布式观测其中每一个传感器只需测量该目标系统的一部分输出信息。每一个传感器将所获取的输出信息传递给其对应的观测器,以实现对其对应目标系统的完整状态的估计。
2) 在对每一部分输出信息及其对应的目标系统的可检测性分解下基础上,为每一个观测器设计合理的算法以实现对对应目标系统完整状态的估。
3) 在工业互联网的技术支持下,本文主要讨论基于有向通信传感器网络的分布式观测器设计问题。通过对两组观测器分别设计基于节点 耦合系数的自适应策略,实现了双目标异质系统的完全分布式观测器的设计。
5 结论
本文在工业互联网技术支持下,通过使用两组传感器网络来分别实现对双目标异质系统输出信息的测量,其中,每一组传感器网络中的单个传感器只需实施对其对应目标系统的一部分输出信息的测量,并结合基于节点的自适应策略,解决了两个相互耦合的、异质线性时不变目标系统的完全分布式观测问题。本文的研究为分布式观测器更好地服务实际应用提供了良好的理论指导,并为多目标异质系统的分布式观测问题提供借鉴。
参考文献
[1] Luenberger D G. Introduction to Dynamic Systems: Theory. Models, and Applications, Wiley, 1979.
[2]Darouach M, Boutayeb M. Design of observers for descriptor systems. IEEE Trans Automat Contr, 1995, 40 (7): 1323–1327.
[3] 杨成梧 , 邹云 . 广义系统正则状态观测器的存在性和设计 . 中国科学 A 辑 , 1991, 9: 982–991.
[4] 刘允刚 , 张纪峰 . 随机非线性系统的最小阶状态观测器及输出反馈镇定控制设计 . 中国科学 E 辑信息科学 , 2004, 34 (4): 416–432.
[5] 黄韬, 汪硕, 黄玉栋, 郑尧, 刘江, 刘韵洁. 确定性网络研究综述.通信学报 , 2019, 40 (6): 160–176.
[6] 余晓晖 , 刘默 , 蒋昕昊等 . 工业互联网体系架构 2.0. 计算机集成制造系统 , 2019, 25 (12): 2983–2996.
[7] 牛晗 , 韩超 , 梁涛 , 余忻 , 张志果 . 工业互联网体系架构在城市供水全过程监管业务化平台建设中的应用 . 给水排水 , 2020, 46 (6):163–167.
[8] 杨涛 . Predix: 工业互联网的阶段性界碑 . 中国工业评论 , 2015,10: 76–81.
[9] 郑海滨 , 龙铭康 , 苏厚胜 , 王晓玲 . 虚拟结构与人工势场相结合的机艇协同编队. 中国控制会议,2021.
作者简介:范真(1996.10-),男,汉族,江苏连云港,模型软件开发 助理工程师,硕士研究生,研究方向:多智能体
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)