.jpg)
一种噪声抑制方法、装置及可移动设备专论

陈本东
清华大学;100084
研发背景
随着计算机技术、互联网以及人工智能的迅猛发展,具备人机交互能力的移动设备正广泛进入日常生活和各类应用场景。在众多环境感知手段中,音频感知与图像感知被视为最为关键的信息获取方式。相较于图像处理,音频感知对计算资源的依赖程度较低,所需数据处理量更小,因此在资源受限的移动设备中更具实用优势。
当前音频感知技术的典型应用包括:设备在运行过程中对用户发出的特定语音指令、异常声响(如玻璃破碎声)等事件的快速识别和响应。然而,在现实应用环境中,由于背景噪声、声波的多路径传播和空间混响等干扰因素的影响,单一麦克风系统在收集音频时往往面临信噪比低、声源识别不清等挑战。这些问题使得依赖单麦克风的系统在复杂环境下性能受限。为克服上述技术瓶颈,业界提出了基于麦克风阵列的空间音频处理方案。通过将多个麦克风按照特定几何结构部署,构建出具有空间分辨能力的阵列系统,该方案不仅能够显著提升声源定位的精度,还具备优异的噪声抑制与语音增强能力[1]。该类技术已广泛应用于远程语音通信、安防监控、车载语音控制、助听辅助、智能机器人等多个领域,成为近年来音频信号处理与人机交互技术的重要研究方向。
研发内容
本研究提出了一种结合空间定位与动态声源识别的智能噪声抑制方法,并构建了相应的系统装置,旨在解决移动设备在复杂声环境中的噪声抑制问题。该方法综合利用实时定位、环境感知和音频处理技术,提升设备对特定噪声源的识别与抑制能力。
核心机制包括:通过实时定位模块确定设备空间位置,并采用预设或动态检测手段获取噪声源位置。基于这些位置信息,系统计算噪声源相对于设备的空间关系,动态调整音频处理参数,实现噪声精准抑制。当噪声源位置未知时,系统通过环境学习机制辅助识别与定位,具体包括获取噪声源基线样本、采集环境音频数据、分析与样本对比,判断并确定噪声源位置。系统设计包括:(1)实时定位模块,获取设备位置信息;(2)噪声源定位模块,确定噪声源固定坐标;(3)相对位置分析模块,计算空间关系;(4)信号抑制模块,依据相对位置实施噪声处理。噪声源识别单元通过样本获取、环境数据采集与定位等模块,实现动态识别与定位。音频信号处理层面,系统通过多通道音频阵列同步接收环境音频,识别并抑制噪声源信号,增强主信号清晰度。本方法通过软硬件集成,自动执行噪声抑制任务,提供计算机程序和可读存储介质,便于在不同平台部署。相比现有技术,本方法有效提高了多源干扰环境下的噪声抑制效率,显著提升了设备在语音交互和异常检测中的稳定性与响应效率。
研发解析
本文提出了一种基于空间定位与动态声源识别的智能噪声抑制方法,并针对移动设备设计了相关装置和系统架构。
图 1 所示的噪声抑制场景涉及工作环境中的可移动设备与固定噪声源。可移动设备(如移动机器人)在执行任务过程中需实时获取自身位置,并结合噪声源的固定位置,确定其相对方位。系统据此控制设备实现定向噪声抑制,从而提升语音识别或音频处理的效果[2]。图 2 中噪声抑制方法包括:步骤 S110 中,确定可移动设备在工作环境中的实时位置。该设备可在已知或未知地图的环境中移动,并执行如清扫、巡逻、安防等任务。在此过程中,设备需持续进行高精度定位。该定位依赖SLAM(同步定位与地图构建)技术,通过传感器采集环境数据,动态构建地图并实现位置估算,从而为噪声抑制提供基础支持。
图 3 中,子步骤 S111 包括读取工作环境地图,地图可存储在设备本地或通过通信从远程服务器获取。设备通过相对定位、绝对定位或多源融合方法获取精确位置,提升定位准确性和稳定性。定位完成后,系统识别并定位噪声源。若噪声源为固定位置,其坐标可预设于环境地图中;若无法静态识别,系统通过环境学习机制动态采集音频数据,根据噪声特征定位噪声源。确定噪声源位置后,系统计算其与设备的空间关系,并优化音频处理策略,实现定向噪声抑制。图4 展示了可移动机器人上的音频采集器件阵列结构。该阵列由 MIC1 至 MIC8 组成,均匀分布在二维平面上,覆盖全方位的声源定位需求。系统通过波束形成技术与音频处理算法,对麦克风信号加权,增强目标方向音频并抑制干扰。例如,当噪声源接近设备前方,系统增强该方向的抑制权重,降低噪声影响。系统还融合自适应噪声抑制机制,通过多通道信号同步处理,动态区分目标语音与背景噪声。在设备移动或噪声源位置变化时,系统实时调整麦克风参数,保持稳定的抑噪效果。如噪声源方向不明确,系统将通过环境学习分析音频样本,推测噪声来源并调整处理策略,确保在复杂环境下保持高效的噪声抑制能力。
图 5 为波束零陷步骤流程图。步骤 S140 包括:在S141 中,确定可移动设备的实时朝向;在S142 中,根据设备朝向与相对方向夹角,识别麦克风阵列中对应麦克风。具体通过设备朝向角θr 与设备与噪声源间相对方向角θi,识别麦克风。图6 中,步骤 S140 还包括:子步骤 S144,通过至少两个麦克风接收音频信号;在 S145 中,分析信号参数信息确定来源方向,并结合阵列几何位置计算声源位置;在S146 中,当信号来源方向与相对方向一致时,执行消除操作。系统会比较声源位置与噪声源位置,如一致,则进行噪声抑制。
图 8 中,步骤 S104 包括:在 S1041 中,获取噪声源基准样本;在 S1042 中,控制设备采集环境数据;在 S1043 中,判断是否存在噪声源;在 S1044 中,根据设备位置、姿态及环境数据确定噪声源固定位置。图9 展示噪声抑制装置 100 的组成:实时位置确定单元 110 确定设备实时位置;固定位置获取单元 120 获取噪声源位置;相对位置确定单元 130 确定噪声源相对设备位置;噪声信号抑制单元 140 根据相对位置抑制噪声[3]。图10 中的设备 200 包含处理器 210 和存储器 220,计算机程序控制噪声源定位、相对位置分析及音频处理,程序存储于可读介质中,便于跨设备部署。
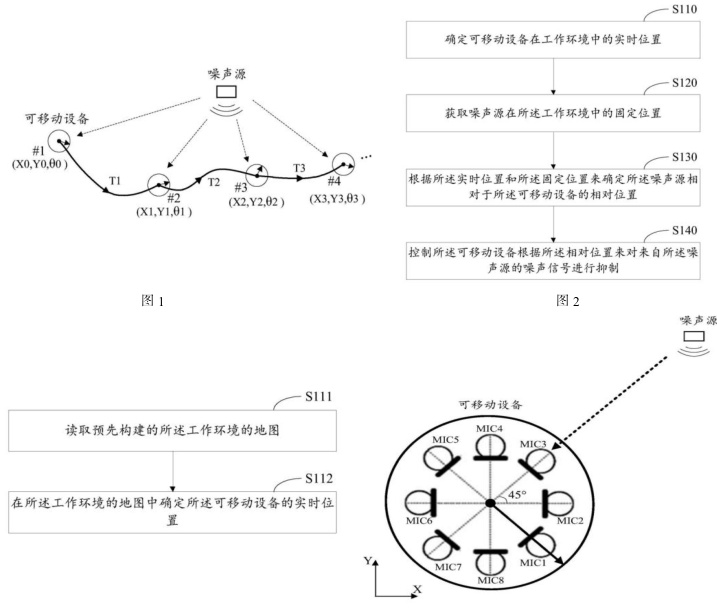
图 3 图 4S141 S144
确定所述可移动设备在所述工作环境中的实时朝向 通过在所述可移动设备上装备的音频采集器件阵列之中的至少两个音频采集器件来接收音频信号S142 S145
根据所述实时朝向与所述相对方向之间的夹角来确定音 根据所述至少两个音频采集器件所接收到的所述音频信
频采集器件阵列之中处于相对方向中的音频采集器件 号的不同参数信息来确定所述音频信号的来源方向-S143 S146控制所述所述音频采集器件以执行所述波束零陷 响应于所述音频信号的来源方向处于所述相对方向中,消除所述音频信号图 5 图 6控制可移动设备构建工作环境的地图S104-S1401获取所述噪声源的基准样本数据确定可移动设备在工作环境中的实时位置 -S1402−S120 控制所述可移动设备在移动过程中采集环境观测数据—S1403根据所述基准样本数据和所述环境观测数据来判断是否S130 存在所述噪声源根据所述实时位置和所述固定位置来确定所述噪声源相对于所述可移动设备的相对位置 -S1404—S140 根据可移动设备的当前位置和姿态、环境观测数据和基准样本数据来确定噪声源在工作环境中的固定位置控制所述可移动设备根据所述相对位置来对来自所述噪声源的噪声信号进行抑制-S145控制所述可移动设备根据所述相对位置来对来自所述噪声源之外的非噪声源的非噪声信号进行增强图 7 图 8处理器增强单元 210总线系统270固定位置获建模块 定元 存储器 音 输出装置240 可移动设备噪声抑制装置100
附图所示
图 1 噪声抑制的应用场景的示意图。
图 2 噪声抑制方法的流程图。
图 3 确定可移动设备的实时位置步骤的流程图。
图 4 音频采集器件阵列的结构图。
图 5 波束零陷步骤的流程图。
图 6 波束零陷步骤的流程图。
图 7 噪声抑制方法的流程图。
图 8 确定噪声源的固定位置步骤的流程图。
图 9 噪声抑制装置的框图。
图 10 可移动设备的框图。
结语
本文提出了一种创新的噪声抑制方法、装置及移动设备,旨在解决复杂噪声环境下的音频处理问题。通过实时定位、环境感知技术与麦克风阵列信号处理,系统能够精准识别噪声源并动态调整抑制策略,从而提升语音交互的清晰度和准确性。该技术在智能移动设备中具有广泛应用前景,并为噪声管理与 环境感知领域的技术进步提供支持。随着技术的不断优化与应用场景扩展,该方法将进一步推动智能设备在多样化环境中的表现,提升用户体验并应对更复杂的挑战。
参考文献
[1]扈建龙.面向传动装置的电驱动系统振动噪声机理与抑制方法研究[D].吉林:吉林大学.2020,02.
[2]王旌阳,张潇,朱俊敏,吴粤北.基于时频谱图的脉冲噪声抑制方法[J].振动与冲击.2010,29(12).
[3]陈建新.基于随机共振理论的CMOS 图像传感器信号依赖噪声抑制方法[D].浙江:杭州电子科技大学.2021,01.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)