.jpg)
基于PIXHawk飞控的倾转旋翼无人机设计

李佳桐 陈继欢 王伟杰 郝立果
天津职业技术师范大学 自动化与电气工程学院 天津 300222
1. 引言
随着经济快速发展,电能需求剧增,维护电力系统安全、排查输电线路故障至关重要。传统人工巡检在高山林地等复杂地形中存在工作量大、技术体能要求高、危险性大等问题。无人机凭借轻巧便携、易于操作、可开发性强等优点,成为电力巡检自动化的重要组成部分。本文旨在研制适用于电力巡航领域的倾转旋翼无人机,通过倾转机构调节电机角度,实现多旋翼与固定翼飞行模式切换,减少对起降场地的要求,提高续航时间。
2. 设计方案
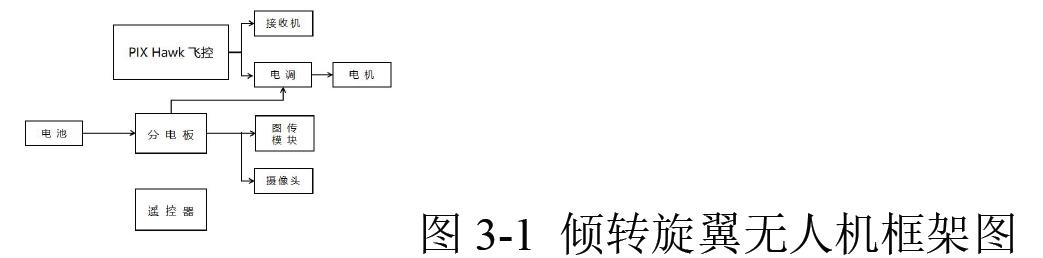
通过研究倾转机械结构、飞行控制部分和图像传输部分。设计的倾转旋翼无人机包括机身、机翼、尾翼、飞行控制模块和倾转模块。通过 PIX Hawk 飞行控制系统控制电机角度转换,实现垂直起降和固定翼飞行模式切换。
2.1 机型选择
结合滑翔机和三旋翼无人机的优点,减少无人机整体重量,利用多旋翼特性实现垂直起降,借助滑翔机滞空能力提高续航时间和巡线距离。
2.2 机翼分析
本课题选用上凸下凹型NACA 0010 和上凸下平型NACA 4412 两种翼型进行分析,在翼型数据分析中模拟了两种机翼副翼上升 7∘ °和副翼下降7°两种状态,总共是四种状态的数据分析。

图2-1 机翼剖面示意图
因为本研究涉及的两种机型已经非常成熟,所以对于弦长,翼展和质量上不需要进行更改,在分析模式只需要选择type 1 固定值分析,雷诺值设定为1000000,N 值设定为9,考虑到无人机在飞行速度上只能算为低速飞机,马赫数直接设定为0 就行。测试的俯仰角度范围在- ⋅20°-20° °。
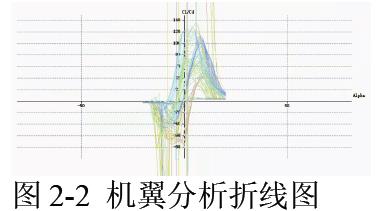
根据分析可知 NACA 4412 升速快、动力需求小、飞行灵活,能提升飞机电池续航时间和巡航范围。
2.3 倾转旋翼无人机模型示意图

2.4 飞行模式规划
无人机在整个过程中应当实现由多旋翼-固定翼-多旋翼的转变,对整个飞行模式的设计如下:
(1) 起飞:3 个电机位置均垂直于地面,1 号电机,2 号电机和3 号电机同时逆时针旋转。(2) 起飞情况下的飞行模式切换:3 个电机停转,舵机控制 1 号电机和 2 号电机旋转 90°,调整至与地面水平的位置。
(3) 飞行:1 号电机顺时针旋转,2 号电机逆时针旋转,3 个电机停转,为无人机提供前拉的动力。(4) 降落情况下的飞行模式切换:3 个电机停转,舵机控制1 号电机和 2 号电机旋转-90°,调整至与地面垂直的位置。
(5) 降落:3 个电机位置均垂直于地面,1 号电机,2 号电机和3 号电机同时逆时针旋转。
3.系统设计
3.1 硬件设计
倾转旋翼无人机在传统固定翼机型上增加倾转装置,通过遥控器控制倾转装置实现飞行姿态切换,搭载图传输模块和摄像头回传输电线路情况。
飞行控制模块选用 PIX Hawk 飞控,其以 STM32F427 为主控芯片,内置两套陀螺仪和加速度计传感器,具备多个可扩展 I/O 接口,可稳定无人机飞行姿态。信号接收模块采用天地飞 RF206S 6 通道导航型接收机,与 ET 系列遥控器配套,提升天线性能和可控范围,解调遥控器信号控制电机转速。动力模块包括银燕 CF2812无刷电机、适配的无刷电调、2200mah 放电倍率 20C 的 3S 锂电池,以及 PDB-TX60 分电板,可将 12V 电压转换为 5V 供舵机和接收机使用。桨叶根据电机 KV 值和机翼长度选择合适尺寸,平衡动力和能耗。倾转结构上端连接电机,内部含 9g 金属舵机,通过齿轮传动实现电机方向转换,由 3D 打印制作,保证精度和减轻重量。转向及角度调整模块采用辉盛 9g 塑料舵机控制固定翼副翼,辉盛 9g 金属舵机安装在倾转装置内控制电机换向,利用 PWM 信号控制舵机角度。图像传输模块选择 5.8G 工作频率、600mw 发射功率的无线图传模块和 1000TVL CMOS 摄像头模块,实现图像实时传输。各模块协同工作,为无人机飞行控制提供硬件支持。
3.2 软件设计:
基于 PIX Hawk 飞控及其配套的 PX4 编程软件展开。PX4 作为专业的无人机编程软件,提供了丰富的底层脚本,便于通过修改参数调整飞行姿态。软件设计主要涵盖起飞程序、飞行模式切换程序和降落程序。在起飞程序中,无人机通过判断航点类型并执行相应的控制逻辑,在满足条件后解锁等待起飞指令。飞行模式切换程序则在无人机达到预设高度时,通过飞控的气压计检测高度,将飞行状态从多旋翼模式切换至固定翼模式,此时三号电机停止转动,一号和二号电机转为前拉模式提供飞行动力。降落程序则在完成巡线任务后,将无人机从固定翼模式切换回多旋翼模式,执行降落操作。整个软件设计通过调参软件连接 PIX Hawk 飞控,对飞行数据日志进行分析和调整,确保无人机飞行的稳定性和精确性。
4.结论
无人机在电力巡检中的应用日益广泛,本课题设计的倾转旋翼无人机虽实现图像传输,但仍存在不足,如无法处理输电线路故障,需人工维修。未来可进一步开发无人机功能,搭载火焰喷射装置处理异物,配备温湿度传感器收集环境数据,升级摄像机实现自动存储录像功能。要实现无人机电力巡航高智能化,还需深入研究自动控制,掌握更多控制方法和通信方式,融合多传感器和检测器械。
参考文献
[1]. 高梓源.倾转旋翼无人机的研究综述[J].中国战略新兴产业,2018,000(01X):P.45-45.
[2]. 陈琦,江涛,史凤鸣, 等.倾转三旋翼无人机过渡模式纵向姿态控制[J].飞行力学,2016,34(6):49
[3]. 梁文勇,严碧武,王海涛, 等.自动航迹规划在无人机电力巡检中的应用[J].电工技术,2019,(10):144-146,149.DOI:10.3969/j.issn.1002-1388.2019.10.060.
[4]. 张龙飞,黑潇,孙霖.民用无人机在互联网时代的发展和应用前景[J].卷宗,2016,6(8):675.
[5]. 陈 治 平, 王 国 华, 盛 琥, 等. 图 像 压缩 与 远 距 离传 输 研 究[J]. 无 线 电通 信 技 术,2016,42(3):49-51,81.DOI:10.3969/j.issn.1003-3114.2016.03.13.
[6]. 詹仁俊.用于电力巡线的新型油动固定翼无人机设计[J].大科技,2017,(3):90-91.
[7]. 许景辉,马贺,周建峰, 等.倾转三旋翼垂直起降无人机悬停姿态控制[J].农业机械学报,2018,49(10):16-22.DOI:10.6041/j.issn.1000-1298.2018.10.002.云南举办第六届全国青少年无人机大赛(云南省赛)[J]. 科技传播,2022,14(13):18.
[8]. 衡磊,王伟,郝一腾,吴苑.倾转三旋翼无人机部分参数选择与优化[J].科学技术创新,2020(07):47-48.
基金项目:国家级大学生创新创业训练计划项目资助(项目编号 202410066031)
作者简介:李佳桐(2004 年11 月),女;汉族,江苏,本科,学生,自动化陈继欢(2000 年12 月),男,汉族,云南,本科,学生,自动化王伟杰(2003 年12 月),男,汉族,江苏,本科,学生,自动化
郝立果(1978 年8 月),男,汉族硕士,工程实训中心教师,副教授,工业自动化
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)