.jpg)
下肢外骨骼机器人设计

张万青 李明哲 成恒强
潍坊工程职业学院 山东潍坊 262500 山东新马制药装备有限公司 山东淄博 255000
中图分类号:TP242 文献标识码:A
Abstract: As a wearable intelligent mechanical device, lower limb exoskeleton robots have shown great application potential in fields such as artificial intelligence, robotics, and biomedicine. This paper uses 3D modeling software (SolidWorks) to design a lower limb exoskeleton robot with three degrees of freedom at the hip, knee, and ankle joints. Each joint is equipped with corresponding drive and transmission mechanisms to simulate natural gait. This provides a reference basis for further research on lower limb exoskeleton robots.
Keywords: Exoskeleton; Bionic design; Structural design; Medical rehabilitation
1 引言
随着科技的飞速发展,特别是在人工智能、机器人技术和生物医学工程等领域的不断突破,下肢外骨骼机器人作为一种创新性的辅助设备, 特殊作业环境等方面的巨大潜力。下肢外骨骼机器人是最近几年出 化思想设计,广泛应用在医疗、军事等领域。目前,世界上许多国 领域可以实现残疾人完成自主行走,在军事领域可以帮助士兵在复杂的环境下解决士兵的 兵体能之间的矛盾。本文设计的下肢外骨骼机器人主要用在医疗康复领域。
2 下肢外骨骼机器人设计方案
2.1 驱动方式选择
下肢外骨骼机器人是动力装置,需要驱动装置,目前流行的驱动装置主要有三种。
(1)气动驱动
气动驱动系统主要由气源、气缸、控制阀等组成,结构相对简单,易于设计和制造。气动系统主要利用压缩空气作为动力源,在工作过程中不会产生液压油泄露等环境污染问题,气动驱动能够快速响应控制信号,但是气动驱动对环境的要求比较严格。环境等变化因素会影响气动系统的稳定性,导致运动速度或者力矩不稳定。气动驱动在工作过程中会产生比较大的噪音,可能会影响工作。
(2)液压驱动
液压驱动能够传递比较大的力和力矩,、液压驱动的介质是液压油,具有防腐蚀和自润滑的性能,液压油的可压缩性比较小,这样系统运行起来比较平稳,液压驱动系统需要配备液压泵、油箱、控制阀等辅助设备,导致成本较高。同时,液压元件的重量也相对较大,可能增加整体系统的重量。
(3)电机驱动
电机驱动通过编码器、传感器等反馈装置,能够实现精确的位置、速度和力矩控制。响应速度快,电机驱动系统结构简单,无液压油泄漏或气压波动问题,维护成本低,使用寿命长。电机驱动的缺点是功率密度相对有限,在需要超大功率的场景中需要配合减速器的使用。
通过对以上三种下肢外骨骼驱动方式的比较,结合本文所设计的下肢外骨骼机器人主要用在医疗康复领域,本文采用电机驱动的下肢外骨骼机器人,选择电机配备减速器机构来作为驱动方式。
1.2 下肢外骨骼机器人尺寸确定
下肢外骨骼机器人尺寸的确定需综合考虑人体工程学、舒适性等原则及实际应用需求,根据目前最新的GB/T10000-2023《中国成年人人体尺寸》标准,结合中国成年人人体尺寸数据,确定下肢外骨骼机器人的关键尺寸范围。例如,大腿杆长度尺寸范围为380~525 mm,小腿杆长度尺寸范围为 290~420 mm,腰杆长度尺寸范围为275~410 mm。
3 下肢外骨骼机器人结构设计
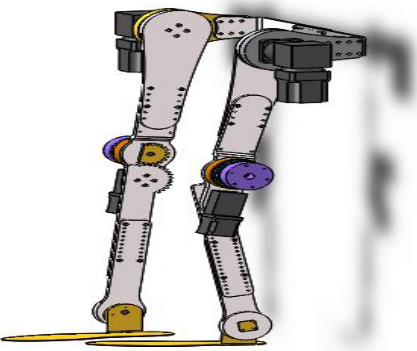
本文设计的下肢外骨骼机器人如图 1 所示,下肢外骨骼机器人主要有三部分组成:电机、大腿、小腿,如图 1 所示。该助力系统主要是由电机来提供动力,通过安装在下肢外骨骼上的压力力传感器所得到信息,对人体的步态进行预测和判断,实现机械运动的实时判断。根据《GB-10000-88 中国成年人人体尺寸》中的测量数据,设计出外骨骼机器人的结构尺寸。
3.1 髋关节设计
为了使穿戴者有良好的舒适性和可调节性,大腿上侧板和髋关节电机固定板使用联轴器连接,腰部设计了横向调节机构和纵向调节机构,这样就可以满足不同腰围穿戴者的使用需要。本设计在髋关节设置 3 个自由度,髋关节驱动采用直角减速器,减少设备轴向长度,适合安装空间受限的场景。
3.2 膝关节设计
在下肢外骨骼机器人膝关节设计中,在膝关节设置 1 个自由度,本设计膝关节包括电磁制动器、柔性装置底盘、柔性装置端盖,在膝关节处设计齿轮换向装置,使大腿和小腿实现平行设置,这样可以实现设计的紧凑性,同时使机构具有较高的寿命和准确的传动比。
3.3 踝关节设计
小腿下侧板和脚通过踝关节轴进行连接,由于踝关节运动主要是依靠人体行走时的惯性,并且踝关节靠近地面,如果在此位置安装电机等装置,外骨骼机器人在行走时就有可能与地面产生干涉,因此,本设计在踝关节设置1 个自由度,
4 结论
本文根据下肢外骨骼机器人的功能性、结构性以及舒适性特点,设计了一款具有十自由度的下肢外骨骼机器人,文章内容主要包括驱动方式的选择,下肢外骨骼机器人自由度的构型确定,髋关节、膝关节以及踝关节的设计,为下一步进行下肢外骨骼机器人的优化设计提供了参考依据。
参考文献:
[1]尹军茂.穿戴式下肢外骨骼机构分析与设计[D].北京:北京工业大学,2010:1-12.
[2]赵彦峻,人体下肢外骨骼设计与仿真分析[J].系统仿真学报,2008
[3]陈峰.可穿戴助力机器人技术研究[D].中国科学技术大学,2007.
[4]蔡梦凡,姚冬苹,谈振辉。Turb 码 SOVA 算法的研究与仿真[J].系统仿真学报,2004,16(12):2797-2
[5] 蒋靖. 下肢助力外骨骼机构设计与研究 [D]. 哈尔滨: 哈尔滨工业大学, 2012.
[6] 赵志鹏. 负重外骨骼下肢力学分析及结构设计[D]. 杭 州:浙江工业大学, 2017.
[7] 李玉珍, 李珏, 王会宁, 等. 汽车装配工人工效学负荷与 工作相关肌肉骨骼损伤的相关性研究[J].中国工业医 学杂志, 2016, 29(35): 266-270.
[8] 杨帆, 谢如坤, 刘芳华. 下肢外骨骼的结构设计与仿真 分析[J]. 机械与电子, 2019, 37(2):198-204.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)