.jpg)
双馈电机矢量控制调速系统的研究与设计

林祥青
中国电子系统工程第三建设有限公司
1 双馈调速的概念及原理
双馈电机的设计与绕线型异步电机相似,由定子和转子的线圈构成。其定子与三相电网相连,而转子则与转换器耦合。在电机运作时,能量的流向取决于定子和转子线圈的吸收或输出功率。通过改变转子励磁电流的大小、相位和频率,可以控制电机在电动或发电模式下的电力输出。这种调节不仅增强了系统的稳定性,还改善了电网的功率因数,提升了系统整体的性能。
2 主电路结构设计及其工作原理
2.1 变频器类型的选择
双馈电机控制系统因为具有独立电源与电网高效交互的特点而受到重视,其中心部件变频器的性能直接影响整个系统的运行效果,按照功能特点划分,变频器可以分为两类基本类型,一类是采用交流-交流(AC-AC)拓扑结构的变频器,另一类则是交流-直流-交流(AC-DC-AC)的变频器,AC-AC 变频器凭借非直接耦合的设计理念。
2.2 主电路结构
就系统架构设计部分而言,本方案按照大功率电机运行的实际要求,首选成本与效能都很不错的晶闸管作为主要的功率元器件,而这种做法和采用三相零式的拓扑构造不同,在这里是以三相桥式的结构为基础的复合电路,利用三十一个晶闸管构成电路,并充分结合三相桥式变换器于相位控制及频率调整方面的技巧。
3 双馈电机矢量控制原理与实现方法
3.1 矢量控制的基本思想
矢量控制技术依靠旋转坐标系理论,通过等效点坐标映射到恒定电流来达成磁链与直流失量的解耦,进而显著改善电动机的运行性能和能量利用效率,图 5 显示了直流电机的等效电路模型,M 线圈代表励磁绕组,其电流为 ISM,T 线圈对应于与转矩成线性关系的电枢绕组,这样的构造有益于深入探究直流电机的工作机理,图 5 还阐述了矢量控制系统的基本原理,而且对这一方法在电动机控制方面的具体应用及其对于改进系统性能的重要作用展开分析[8]。
3.2 异步电动机的数学模型
3.2.1 磁链方程
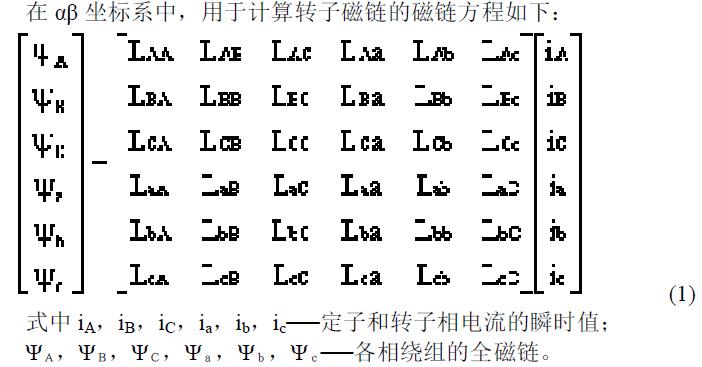
3.3 定子磁场定向矢量控制原理
矢量场控制技术的重点是针对空气动力学特性、转子结构以及定子布局这些关键要素实施精准控制,在空中姿态控制环节,利用动态调整某个坐标系下的 M 轴参数来达成气隙磁场的即时改良,凭借 T 轴电流与转矩之间存在线性联系,可以准确调控电机转速,对于转子状况的检测,则采用MT 系统配合同步旋转磁场设计法,把转子实际运动方向当作参考轴,经过分析定子 M 轴电流变化走向,间接得出转子磁通分布情况,其基本原理就是保证坐标系内部 M 轴一直指向固定磁场方向,让 T 轴电流保持为零,这样就可以简化 T 轴电流常数方程,减轻对定子侧流测量精确度的要求。
4 双馈调速系统控制部分的 DSP 实现
4.1 系统总体结构
如图 5. 如图 1 所示,电动机定子通过频率网络与外部系统相连,变频器通过KML和KM2 继电器与可控电阻器形成闭环控制回路,在此电路中,KM1 和KM2 采用并联方式接入,在启动的开始阶段,KM2 处于断开状态,转子依靠可调电阻完成加速,此时KM1 也处于断开状态,这样可以提高电动机定子的效率。AC-AC变换器的输入端由三个变压器组成,形成一个基于六个脉冲电桥的非隔离型拓扑结构。
4.2 控制部分软件设计
4.2.1 软件模块框图
4.2.2 主程序设计
管理系统程序由主要程序和辅助程序的中断构成。主要程序负责系统启动,涉及中断处理、计算机模块启动、输入输出端口配置、模拟/数字转换样本设置以及其他变量的初始化。主处理器的架构如图 12 所展示。
4.3 几个关键寄存器的设置
程序中预设的常量如下所述:
计时器周期值:由 100 微秒除以 2 再除以 50 纳秒得到,结果为 1000个计数周期
最小正脉冲宽度:由 3 微秒除以 50 纳秒得出,为 60 个计数周期
最小负脉冲宽度:由 47 微秒除以 50 纳秒得出,等于 940 个计数周期。单个通用定时器控制寄存器(TxCON),其中  取值为 1、2、3、4 。该寄存器的第 15 位为 Free,第 14 位为 Soft,第 13 位为保留位,第 12 位为TMODE1,第 11 位为 TMODE0,第 10 位为 TPS2,第 9 位为 TPS1,第 8位为 TPS0 。第 7 位为 T2SWT1/T4SWT3 + ,第 6 位为 TENABLE,第 5 位为 TCLKS1,第 4 位为 TCLKS0,第 3 位为 TCLD1,第 2 位为 TCLD0,第1 位为 TECMP,第 0 位为 SELT1PR/SELT3PR+ 。
取值为 1、2、3、4 。该寄存器的第 15 位为 Free,第 14 位为 Soft,第 13 位为保留位,第 12 位为TMODE1,第 11 位为 TMODE0,第 10 位为 TPS2,第 9 位为 TPS1,第 8位为 TPS0 。第 7 位为 T2SWT1/T4SWT3 + ,第 6 位为 TENABLE,第 5 位为 TCLKS1,第 4 位为 TCLKS0,第 3 位为 TCLD1,第 2 位为 TCLD0,第1 位为 TECMP,第 0 位为 SELT1PR/SELT3PR+ 。
软件开发时,正确设置通用定时器是保证系统按预期工作的关键因素,通过修改定时器控制寄存器 T1CON 里的某些字段可以准确地设定定时器的工作模式及其相关参数,执行指令“SPLK#1000100001000010B, T1CON”之后,定时器会被设置成连续递增/递减计数模式,而且会把预分频系数设为 1,这样就可以达到目标频率下的计数效果,从而符合程序时序控制的要求,T1CON 寄存器里的 TCLD1/TCLD0 位同定时器比较寄存器的重装载机制紧密联系在一起,在某些场合可以选择关闭此功能以简化设置过程。
结语
本研究依托 M-T 理论框架,把双馈电机当作研究对象,创建了异步电动机的数学模型,用稳定磁场定向矢量控制策略实施细致分析,文章先讲解了矢量控制的基本原理,接着规划了双输出调制系统的总体架构,完成了控制单元软件开发的具体任务,包含系统模块划分和代码编写工作,又探究了 DSP 密钥寄存器的设置办法,DSP 驱动控制模块的设计思路以及 PI控制器参数改良方案,还对 DSP 生成 SPWM 波形的主要算法做了详尽的阐述和说明。
参考文献
[1]鲁亿方,王国霞.双馈电机矢量控制系统的仿真研究[J].实验技术与管理,2024,35(03):105-108+145.
[2]李瑾.双PWM控制的双馈调速系统在泵站电机上的应用[J].长江科学院院报,2024,34(10):155-158.
[3]赵梅花,阮毅,钟沁宏,等.绕线异步电机双馈调速控制[J].电机与控制应用,2023,40(11):37-41.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)