.jpg)
线性约束不确定系统的滚动时域融合估计

王守栋
青岛工学院
turnacnesrftWoaritnmheNtdhCeiSndts.oevFteihlresotp eomafsetanltslqoufsaisrnceigsetnohcpet bamanisdziacteiocdhenanporlfobgcloyenmasnedbnastsuhesedaplorgnogrtirhtehssmre,ogtfuhlceaorcimozpsatuiftoeunrntctethiceohonryio.nl oTtghye npthetrehfeomrsucmlatalin-asrcenwisenoidrgehfxtuecsdiaonln nbesatriemcmoaitnisiotmnruocfmtedvaNbriyeatnwceoeirgkfheutdsedoCnfounestsirtoionlmaoStfyistothnemasltsga(oterNitpChrSemsd)icsh iauosnegdrvatldoueraesl.laylS zebeceoctnohedmleyw eac orgenhstseidadrecfriuhnsighotnthsepofoptle.orfcAoarlomsbtauntsceteedisintsitdrmeibxauetwsei,tdhamnudonvctihenretgna htnhoerpazoropatnimfmeutaesliros,tnatteheseeimsmtiiantmiioamtnaexsmoaerptethomdbziasanipeordonpoFrsionebdalelfymo,r olhifenehsateraabcliolginotsryt ohafimntehides Keywords: Networked control systems; uncertain parameters; moving horizon estimation; fusion estimation
1.1 课题研究的背景及意义
在状态估计研究历程中,网络化控制系统的多传感器融合估计是目前研究热点之一。早期的多传感器融合估计技术主要是为军事目的而研究,并且早期大多数控制系统的测量信息总是由单个传感器获取[1],这样造成测量信息具有一定的局限性。随着科技发展和分布式系统涌现,对实际工业控制过程提出了更高的控制精度要求,多传感器的分布式融合估计问题受到学术界的广泛关注。与传统集中式融合相比,分布式融合采用并行结构,具有计算负担小,鲁棒性好且便于故障诊断的优点。目前为止,多传感器融合估计技术已广泛应用于各个领域和行业,包括智能机器人系统、无人驾驶汽车、目标跟踪、信号处理等[2-6]。
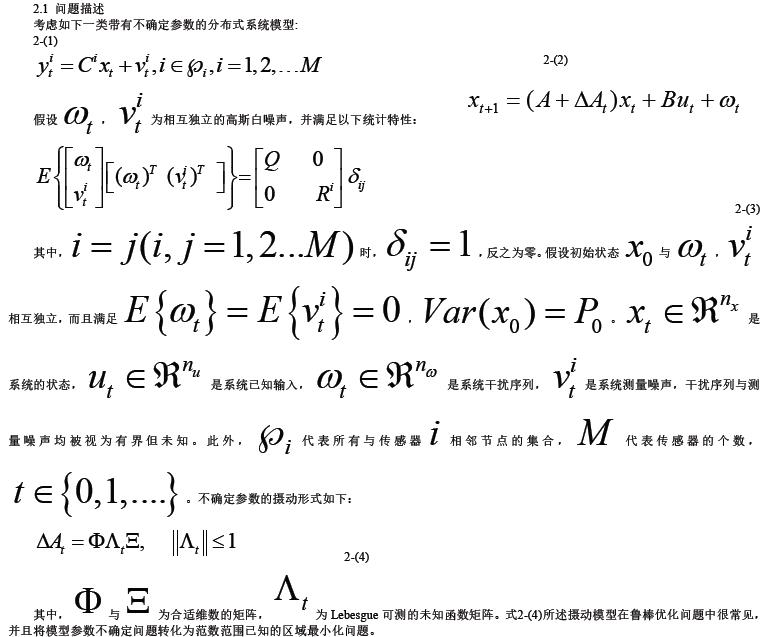
滚动时域估计(Moving Horizon Estimation,,MHE)是近年来迅速发展起来的一种有限时域估计方法。基于模型预测控制(Model PredictiveControl,MPC)的基本原理,这种方法具有滚动优化、动态处理约束、对噪声的统计特性无特殊要求的特点[7-8]。目前,MHE 已广泛应用于化工过程状态估计[7-10]、故障检测[11]、系统识别[12]、电池荷电状态估计[13]、切换系统[14-15]、大规模系统[16]、不确定系统和分布式系统[17-26]。因此,本文将开展基于 MHE 的不确定系统分布式融合估计问题的研究。
1.2 国内外研究现状及发展趋势
目前,关于多传感器融合估计的问题已经取得了丰富的研究成果。文献[27]研究了网络复杂性和随机参数不确定性下的分布式融合估计问题,提出了一种基于事件触发的信号选择方法,以解决网络造成的丢包和随机传输延迟造成的包混淆问题。文献[28]研究了网络攻击(DoS)下的分布式融合估计,利用最大最小鲁棒估计准则设计了协方差未知的局部卡尔曼滤波器(LKF),提出了基于最优加权融合准则的分布式卡尔曼滤波器(DFKF)算法。文献[29]研究了存在相关噪声和未知测量干扰的多传感器随机不确定系统的信息融合状态估计,推导出了任意两个局部预测变量之间估计误差的互协方差矩阵,并成功分析了其稳态特性。但上述局部估计所采用的算法均为卡尔曼滤波,无法考虑系统约束,无法处理复杂非线性系统,对于含有约束的分布式系统的融合估计问题无法得到有效处理。为此,文献[30]充分考虑分布式系统约束与估计的一致性,采用 MHE 算法以获取局部最优状态估计并分析了代价函数的一致性,进而给出了整个系统估计误差收敛的充分条件。
对于模型参数的不确定性问题,文献[31]提出了不确定系统状态估计的基本框架。当系统当中存在范数有界不确定参数时,通过求解正则化最小二乘问题,得到了最坏情况下系统的稳态估计量,并将估计结果推广到测量值也存在不确定的情况。文献[32]利用文献[31]提出的结论,针对丢包和量化约束下的随机不确定系统提出了一种分布式滚动时域估计方法。该文采用预测补偿策略处理丢包现象,并通过求解固定时域内的min max 问题得到局部估计器,推导出局部估计误差范数平方期望收敛的充分条件,以及采用 CI 融合准则进行加权融合以获取最优融合估计值。
基于以上分析,本文针对含有模型参数不确定的网络化控制系统,分别从系统建模、估计器设计、不确定参数求解、稳定性分析以及仿真实验等方面对估计算法进行了研究。
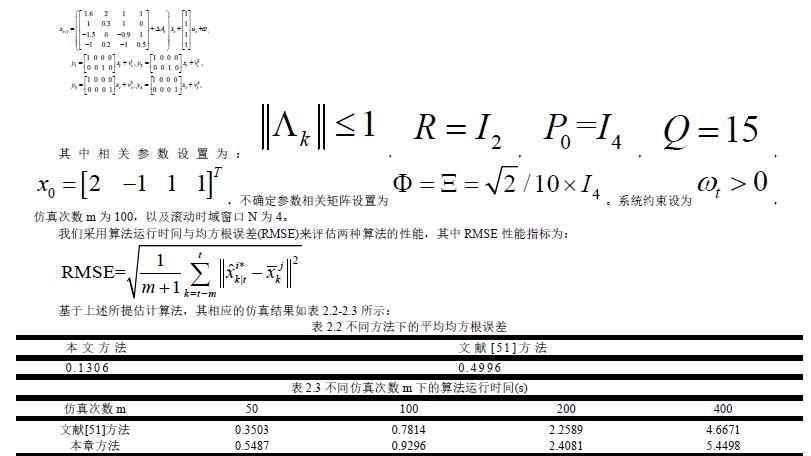
本章提出的DMHFE算法与文献[51]中的方法进行了比较。由于本章所提算法考虑了模型不确定参数对系统的影响,并采用了标量加权的线性最小方差融合估计准则,因此具有更好的仿真效果。表2.3则给出了两种算法的RMSE比较结果。可以看出,本文所给出的RMSE明显低于文献[51]方法的RMSE,这也表明本文提出的算法具有良好的估计性能,并且状态估计结果更加接近系统真实状态。
2.结论
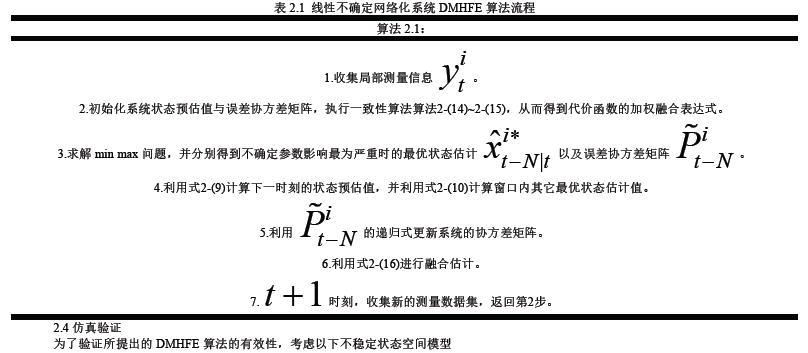
针对线性不确定网络化系统,本章提出了一种分布式滚动时域融合估计方法。首先,考虑到分布式状态估计的一致性,设计了一种一致性算法,并通过性能指标中状态预估值的加权融合重构代价函数。随后,通过求解局部滚动时域估计的minmax优化问题,得到局部最优估计以及时变权矩阵的表达式。其次,基于标量加权的线性最小方差融合估计策略,加权融合得到系统的最优状态估计。然后,证明了融合估计误差的稳定性,以及给出了融合估计误差与局部估计误差的关系。最后,仿真结果表明,该算法具有良好的估计性能。
参 考 文 献
Zou L, Wang Z D, Hu J and Han Q L. Moving horizon estimation meets multi sensor information fusion: development, opportunities and challenges [J]. Information Fusion, 2020, 60:1-10.
Heo S and Park C G. Consistent EKF-based visual-inertial odometry on matrix lie group [J].IEEE Sensors Journal, 2018, 18(9): 3780-3788.
Mur-Artal R, Montiel J and Tardos J D. Orb-slam: a versatile and accurate monocular slam system [J]. IEEE Transactions on Robotics, 2015,31(5):1147-1163.
Forster C, Carlone L, Dellaert F and Scaramuzza D. On-manifold preintegration for real-time visual-inertial odometry [J]. IEEE Transactions on Robotics, 2017, 33(1):1-21.
Li M, Yu H, Zheng X and Mourikis A I. High-fidelity sensor modeling and self-calibration in vision-aided inertial navigation[J]. 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014:409-416.
Wang Z, Yang L, Huang Z, Wu J, Zhang Z and Sun L. Human motion tracking based on complementary Kalman filter[J]. 2017 IEEE 14th International Conference on Wearable and Implantable Body Sensor Networks (BSN), 2017:55-58.
Zhao G R, Han X and Du W J. Fusion estimator with stochastic sensor gain degradation for uncertain systems [J]. Control and Decision, 2016:1413-1418.
Guo G Wang B F. Robust kalman filtering for uncertain discrete-time systems with multiple packet dropouts[J]. Acta Automatica Sinica, 2010, 36(5):767-772.
Ramlal J, Allsford K V and Hedengren J D. Moving horizon estimation and control for an industrial gas phase polymerization reactor [J]. IFACProc,2007, 40(12):1040-1045.
Zavala V M and Biegler L T. Optimization-based strategies for the operation of low-density polyethylene tubular reactors: Moving horizon estimation [J]. Computers &Chemical Engineering, 2009, 33(1):379-390.
赵石磊,吴丽娜.基于多模型滚动时域估计的卫星故障诊断[J].空间科学学报,2011,31(05):647-652.
Kühl P, Diehl M, Kraus T, Schlöder J P and Bock H G. A real-time algorithm for moving horizon state and parameter estimation [J]. Computers & Chemical Engineering, 2011, 35(1):71-83.
Zhang Z, Xue B and Fan J. Noise adaptive moving horizon estimation for State-of-Charge estimation of li-ion battery [J]. IEEE Access, 2021, 9:5250-5259.
Alessandri A, Baglietto M, and Battistelli G, Receding-horizon estimation for switching discrete-time linear systems [J]. IEEE Transactions on Automatic Control, 2005,50(11):1736-1748.
Guo Y and Huang B. Moving horizon estimation for switching nonlinear systems [J]. Automatica, 2013, 49(11):3270-3281.
Farina M, Ferrari-Trecate G and Scattolini R. Moving-horizon partition-based state estimation of large-scale systems [J]. Automatica, 2010,46(5):910-918.
Farina M, Ferrari-Trecate G and Scattolini R. Distributed moving horizon estimation for linear constrained systems [J]. IEEE Transactions on Automatic Control, 2010, 55(11): 2462–2475.
Luo J, Chai L and Wang Z. Distributed moving horizon state estimation for wireless sensor networks using multiple quantized data [J]. Journal of Electronics & Information Technology, 2009, 31(12): 2819-2823.
范建明,薛斌强.带有丢包的分布式网络系统的滚动时域融合估计策略[J].复杂系统与复杂性科学,2021,18(03):75-79+87.
Farina M, Ferrari-Trecate G and Scattolini R. Distributed moving horizon estimation for nonlinear constrained systems [J]. International Journal of Robust and Nonlinear Control, 2012, 22(2):123-143
赵海艳,陈虹.噪声方差不确定约束系统的滚动时域估计[J].控制与决策,2008(02):217-220.
Yin X and Huang B. Event-triggered distributed moving horizon state estimation of linear systems [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(10):6439-6451.
Schneider R, Hannemann-Tams R and Marquardt W. An iterative partition-based moving horizon estimator with coupled inequality constraints [J]. Automatica, 2015, 61:302-307.
Liu A, Yu L, Zhang W and Chen M. Moving horizon estimation for networked systems with quantized measurements and packet dropouts [J]. IEEE Transactions on Circuits and Systems, 2013,60(7):1823-1834.
宋秀兰,周文乐,徐晨辉,何德峰.整车主动悬架系统分布式滚动时域一致性估计[J/OL].控制理论与应用:1-9[2023-04-17].
Fagiano L and Novara C. A combined moving horizon and direct virtual sensor approach for constrained nonlinear estimation [J]. Automatica, 2013, 49(1):193-199.
Pang C, and Sun S, Fusion predictors for multi-sensor stochastic uncertain systems with missing measurements and unknown measurement disturbances [J] IEEE Sensors Journal, 2015,15(8):4346-4354.
Xu M, Zhang Y, Zhang D and Chen B. Distributed robust dimensionality reduction fusion estimation under DoS attacks and uncertain covariances [J]. IEEE Access, 2021 9:10328-10337.
田甜. 带有限步相关噪声随机不确定系统的信息融合估计[D].黑龙江大学,2017.
BattistelliG. Distributed moving-horizon estimation with arrival-cost consensus [J]. IEEE Transactions on Automatic Control, 2019, 64(8):3316-3323.
Sayed A H. A framework for state-space estimation with uncertain models [J]. IEEE Transactions on Automatic Control, 2001, 46(7):998-1013.
刘帅,赵国荣,曾宾,高超.丢包和量化约束下的不确定系统分布式滚动时域估计[J].控制与决策,2021,36(07):1771-1778.
Alessandri A, Baglietto M and Battistelli M. Moving-horizon state estimation for nonlinear discrete-time systems: New stability results and approximation schemes [J]. Automatica, 2008, 44(7):1753-1765.
Alessandri A, Baglietto M and Battistelli G. Min-max moving-horizon estimation for uncertain discrete-time systems [J]. SIAM Journal on Control and Optimization, 2012, 50(3):1439-1465.
Duan P, Duan Z, Lv Y and Chen G. Distributed finite-horizon extended kalman filtering for uncertain nonlinear system [J]. IEEE Transactions on Cybernetics, 2021, 51(2):512-520.
陶贵丽,李爽,刘文强.网络化不确定系统集中式融合鲁棒稳态估值器[J].控制理论与应用: 2013, (02):1-12.
魏瑶. 多传感器网络化随机不确定系统分布式递推融合估计 [D].黑龙江大学,2022.
杨春山,经本钦,刘政,王建琦.具有噪声方差及多种网络诱导不确定系统鲁棒Kalman估计[J].控制理论与应用,2021,38(10):1607-1618.
杨智博,邓自立.带不确定方差乘性和加性噪声系统鲁棒加权融合稳态Kalman估值器[J].控制理论与应用,2018,35(04):547-556.
王林波,王蒙一,周思全,江涌,化永朝,董希旺.考虑未知输入的异构集群系统群体智能合围跟踪控制 [J/OL].中国科学:技术科学,2013,1-16.
刘柯. 含有未知输入的传感器网络跟踪问题研究 [D].山东师范大学,2022.
高升,马广富,郭延宁.基于自适应未知输入观测器的多故障快速重构 [J].系统工程与电子技术,2022,44(07):2364-2373.
宋信敏,高玲.未知输入系统最优估计的研究综述[J].山东师范大学学报(自然科学版),2022,37(03):217-227.
Hua Z F, Callafon R and Cortés J. Simultaneous input and state estimation for nonlinear systems with applications to flow field estimation [J]. Automatica, 2013, 49(9): 2805-2812.
Shu H S, Zhang S J, Shen B and Liu Y R. Unknown input and state estimation for linear discrete-time systems with missing measurements and correlated noises [J]. International Journal of General Systems, 2016,45(5):648-661.
Yu D, Xia Y, Li L, Xing Z and Zhu C. Distributed covariance intersection fusion estimation with delayed measurements and unknown inputs [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(8):5165-5173.
Kong H, Shan M, Su D, QiaoY,Al-Azzawi A andSukkarieh S. Filtering for systems subject to unknown inputs without a priori initial information [J]. Automatica, 2020, 120(1):1-12.
林晓冬,张锐.含模型不确定性和状态约束的航天器姿态鲁棒控制[J].宇航学报,2022,43(06):781-789.
刘帅,赵国荣,韩旭,李海君.带丢包和不确定性的组网运动体姿态估计算法[J].电光与控制,2021,28(09):1-5.
刘帅,赵国荣,曾宾,等. 带丢包和量化的参数不确定系统滚动时域估计 [J]. 系统工程与电子技术, 2020, 42(4):912-918.
Talebi S. P and Werner. S, Distributed kalman filtering and control through embedded average consensus Information Fusion [J]. IEEE Transactions on Automatic Control, 2019,64(10):4396-4403.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)